标签:更新 ane mtom 包含 log 环境 pgp nbsp 聚类
1.定位方法:
1.1 基于电子信号的定位:GPS
1.2 航迹推算:IMU(加速度计+陀螺仪),轮速计
1.3 环境特征匹配:传感器感知+融合
2.地图:
2.1 3D voxel地图
2.2 点云地图
2.3 2D概率地图
3.技术
2.1 RTK:容易受电磁环境干扰’
2.2 GPS:
1.缺点:多径效应
2.3 激光点云定位技术:反射值+高度值,自适应匹配
1.缺点:场景变化太大,废掉
2.相关技术和工具:PostgreSQL,PostGIS, pgpointcloud: https://github.com/digoal/blog
2.4 视觉定位:
1.在线特征检测:FCN图像分割;分段直线聚类
2.特征匹配:
2.5 惯性导航
1.yaw对齐:双天线(两个GPS连线的方向);车跑起来的速度方向+之后的卡尔曼滤波
2.缺点:短时很准,随着时间推移,误差增大
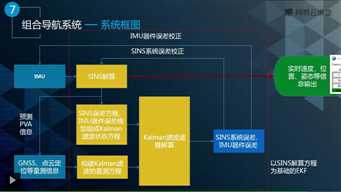
2.6 组合导航
1.融合方法:卡尔曼滤波器(惯导的输出作为时间更新;GPS/点云的位置作为量测更新)
3.高精地图
3.1 高精地图方案:百度-激光+相机;宽凳科技-纯视觉制图20cm;英伟达-高精实时制图;DeepMotion-纯视觉制图
3.2 地图格式:
1. NDS:国内不是很多,国外大厂-宝马
2. OpenDrive:apollo
section;lane;junction;
3.3 厂商:
1. here-诺基亚,80%欧美市场,戴姆勒30亿美金收购,腾讯、四维入股
2. mobileye
3.谷歌:激光+图像
4.TomTom:激光点云
5.apollo:GPS(RTK)+IMU,激光(64线+16线)+摄像头,长短焦
3.4 关键技术
1.激光:点云分割,点云DeepLearning,点云Slam,点云特征提取
2.算法输出:定位地图;高精地图;路径规划地图;仿真地图
3.5 包含信息:
1.lane;Road及其边界——>辅助横向定位
2.红绿灯,指示牌——>指导驾驶
3.树木,建筑——>可以辅助定位车辆
4.司机的驾驶习惯:什么地方加减速——>让无人驾驶更像人
3.6 apollo高精地图
1.坐标系:UTM;WGS84;坐标系
标签:更新 ane mtom 包含 log 环境 pgp nbsp 聚类
原文地址:https://www.cnblogs.com/yrm1160029237/p/10963208.html