标签:math 边缘检测 har ecc 之间 灰度 opencv 不同的 ros
腐蚀
img = cv2.imread(‘j.png‘,0) kernel = np.ones((5,5),np.uint8) erosion = cv2.erode(img,kernel,iterations = 1)
膨胀
dilation = cv2.dilate(img,kernel,iterations = 1)
先进性腐蚀再进行膨胀就叫做开运算。就像我们上面介绍的那样,它被用来去除噪声。这里我们用到的函数是 cv2.morphologyEx()。
opening = cv2.morphologyEx(img, cv2.MORPH_OPEN, kernel)

梯度简单来说就是求导,对于像素点的分布曲线求导,然后在像素变化较大的地方即为边缘,通过求导可以求出边缘的位置。
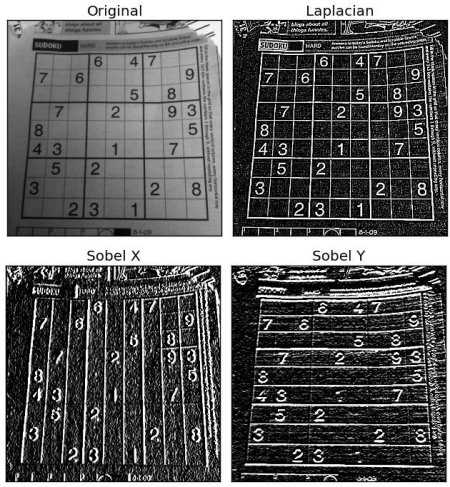
OpenCV 提供了三种不同的梯度滤波器,或者说高通滤波器:Sobel,Scharr 和 Laplacian
Sobel,Scharr 其实就是求一阶或二阶导数。Scharr 是对 Sobel(使用小的卷积核求解求解梯度角度时)的优化。Laplacian 是求二阶导数。
laplacian = cv2.Laplacian(img,cv2.CV_64F) sobelx = cv2.Sobel(img,cv2.CV_64F,1,0,ksize=5) sobely = cv2.Sobel(img,cv2.CV_64F,0,1,ksize=5)
效果如图:
1.去除噪声,高斯核
2.计算梯度
3.进行运算
4.非极大值抑制
5.设置两个阈值(图像的灰度梯度高于 maxVal 时被认为是真的边界,那些低于 minVal 的边界会被抛弃。如果介于两者之间的话,就要看这个点是否与某个被确定为真正的边界点相连,如果是就认为它也是边界点,如果不是就抛弃)
在OpenCV中通过cv2.Canny()来进行,这个函数的第一个参数是输入图像。第二和第三个分别是 minVal 和 maxVal。第三个参数设置用来计算图像梯度的 Sobel卷积核的大小,默认值为 3。最后一个参数是 L2gradient,它可以用来设定求梯度大小的方程。如果设为 True,就会使用我们上面提到过的方程,否则使用方程: . 代替,默认值为 False。
. 代替,默认值为 False。
例如:
edges = cv2.Canny(img,100,200)
标签:math 边缘检测 har ecc 之间 灰度 opencv 不同的 ros
原文地址:https://www.cnblogs.com/ywheunji/p/10990150.html