标签:rect 驱动 space pkg linu automatic 通过 基础 term
rosaria wiki
ARIA and ARNL Robot Parameters
How ARIA Connects To Lasers
Running a Program at Linux Startup
Ubuntu Linux Network Configuration
Linux C++ Compilers
Laser Rangefinder
SICK LMS-100/LMS-111/LMS-500 Laser Rangefinders
ubuntu 网络配置
ROS 网络连接LMS100
ROS 网络连接LMS5xx
deb http://ros.exbot.net/rospackage/ros/ubuntu/ trusty main
ROSARIA
ROS for indigo
to search available packages
apt-cache search ros-indigo
最初只安装一个版本,便把环境变量加进去了
Note that catkin_init_workspace must be run inside the src subdirectory, but catkin_make is used in the parent workspace directory. catkin_init_workspace only needs to be done once in the src directory.
Every time you want to use the catkin workspace to build packages, you must source the special devel/setup.bashscript:
cd catkin_ws
. devel/setup.bash
You must do this for every new shell or terminal window you open.
If you only use one catkin workspace, you can add this command to your .bashrc file, so that it automatically occurs for every new shell or terminal window you run.
For example, if your catkin workspace is catkin_ws in your home directory, edit .bashrc in your home directory and add the following line to the end of the file. The .bashrc file is normally hidden, but you can still reference it to edit it or enable "Show hidden files" in the file browser preferences.
. ~/catkin_ws/devel/setup.bash
If you have multiple catkin workspaces for multiple versions of ROS, you must source the setup file from inside the workspace you want to use.
ARIA for linux
安装ROSARIA后别装单独装ARIA了,会有版本冲突
libaria2.9.deb无法安装,因为电脑中已经有2.8版本,可能是RODARIA的依赖包
kinetic 版本,需要在安装目录重新编译以解决问题。
ros-arnl 安装(还未装)
先安装arnlbase, arnl包>=1.9.2
编译
安装mobilesim,Mapper,MobileEyessudo dpkg -i libaria*
tar -zxvf Mapper3-2.2.5.tgz
sudo mv Mapper3-2.2.5 /usr/local/
tar xzf MobileSim-src-0.7.5.tar.gz
export ARIA=/usr/local/Aria
cd ./MobileSim-src-0.7.5
make -j4
sudo make installcd /usr/local/Aria/examples
./demo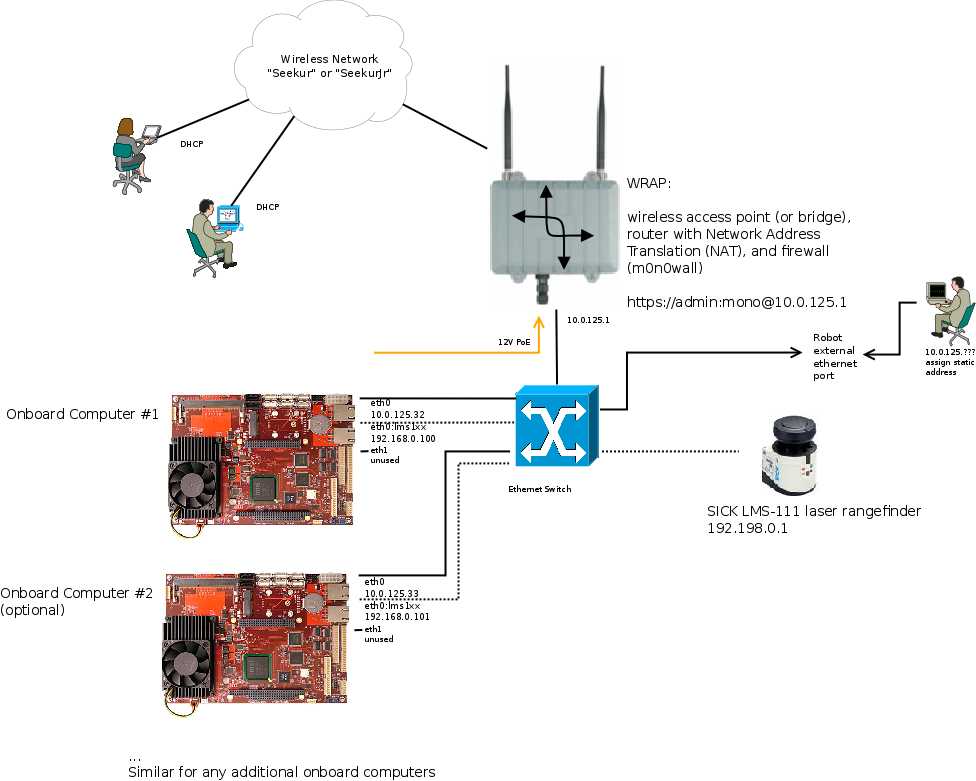
<launch>
<arg name="urdf" default="$(find amr_robots_description)/urdf/pioneer3at.urdf" />
<param name="robot_description" textfile="$(arg urdf)" />
<node pkg = "rosaria" type = "RosAria" name = "RosAria">
<param name="port" value="/dev/ttyUSB0" type="string"/>
<param name="publish_aria_lasers" value="true"/>
<param name="zsstart_pose_x" value="0.0"/>
<param name="zsstart_pose_y" value="0.0"/>
<param name="zsstart_pose_th" value="0.0"/>
</node>
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" />
<node name="robot_state_publisher" pkg="robot_state_publisher" type="state_publisher" />
</launch>标签:rect 驱动 space pkg linu automatic 通过 基础 term
原文地址:https://www.cnblogs.com/lizhensheng/p/11117714.html