标签:编写 执行文件 开发环境 显示驱动 bsp img 驱动 取图 文件
摄像头采集子系统
一.摄像头驱动的使能配置
摄像头软件驱动构架
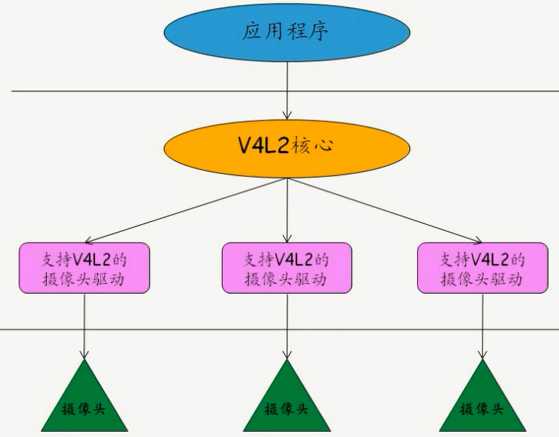
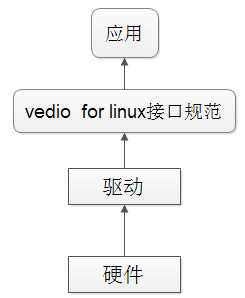
摄像头采集系统由上图所示,硬件(摄像头) -> 驱动(Linux内核配置中,选择支持V4L2的驱动选项) -> V4L2接口设计 -> 图像采集。
硬件:选择USB摄像头,内置芯片ZC30系列,Linux包含的万能驱动兼容;
驱动:配置Linux内核,选择万能摄像头驱动中ZC30系列驱动文件、支持V4L2接口,编译下载内核;
内核下载至开发板并挂载后,摄像头开发环境以搭建完成,以下即为应用采集。
V4L2接口:编写基于V4L2接口的测试程序,使之能满足基本采集需求->测试程序camera.c;
应用:" arm-linux-gcc camera.c -o camera ",插上USB摄像头至开发板显示驱动连接信息,运行执行文件" ./camera ",即可捕获采集的图像。
二. V4L2图像编程接口基础设计
1.V4L2接口设计构架图:
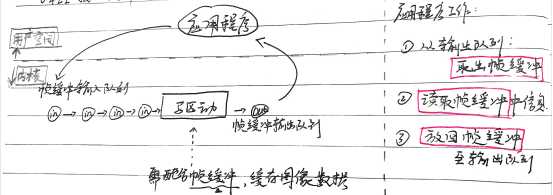
由上图可看出,内核空间中帧缓冲存储着摄像头驱动所采集的图像信息,用户空间的应用程序需要获取采集到的的图像,则需要对帧缓存进行一下处理:
取出帧缓冲(出队列) -> 读取帧缓冲中数据 -> 放回帧缓冲(入队列)!
2. V4L2摄像头编程模型
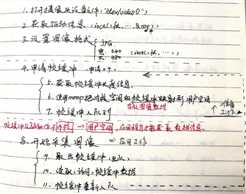
步骤1~3 :为图像参数的基本配置;
步骤4~7 :为帧缓冲的处理工作,必须将内核的帧缓冲映射到用户空间,方可获取图像信息;
步骤8~11:为采集图像流程,通过对帧缓冲进行取出 -> 读取 -> 放回,实现对图像的采集;--->>>此步骤可按照应用要求设计!
标签:编写 执行文件 开发环境 显示驱动 bsp img 驱动 取图 文件
原文地址:https://www.cnblogs.com/hjh-666/p/11218534.html