标签:ror rate pos int src 自由度 class span mamicode
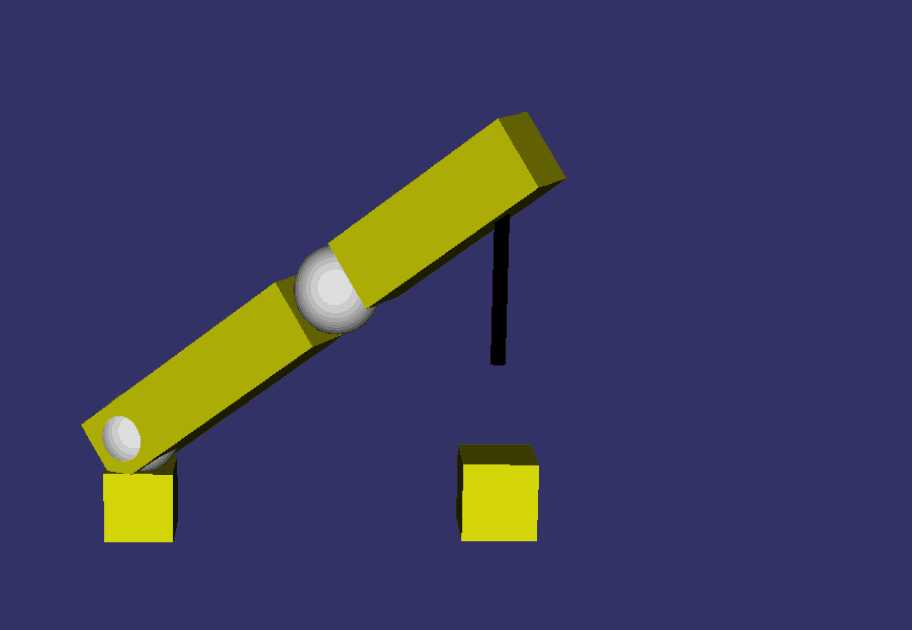
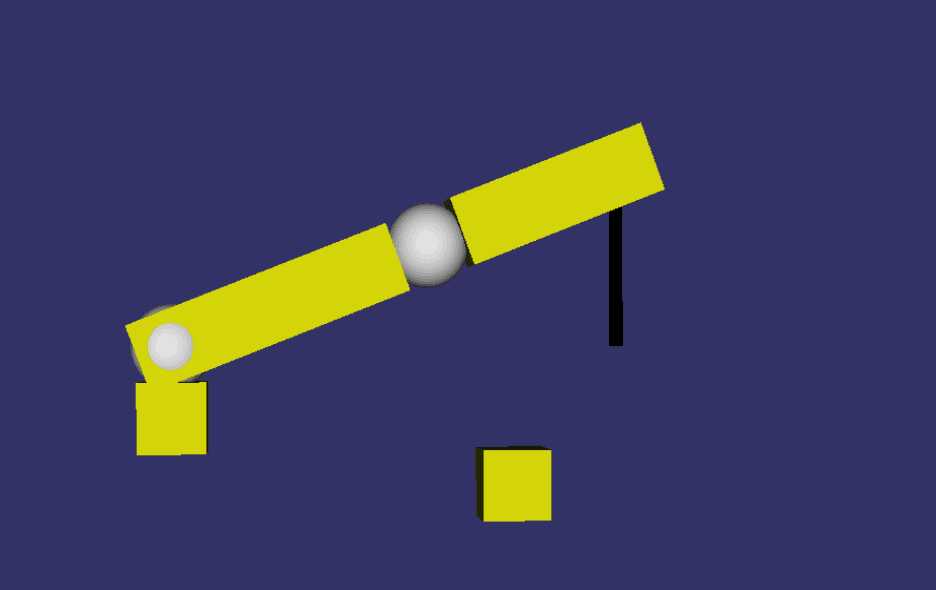
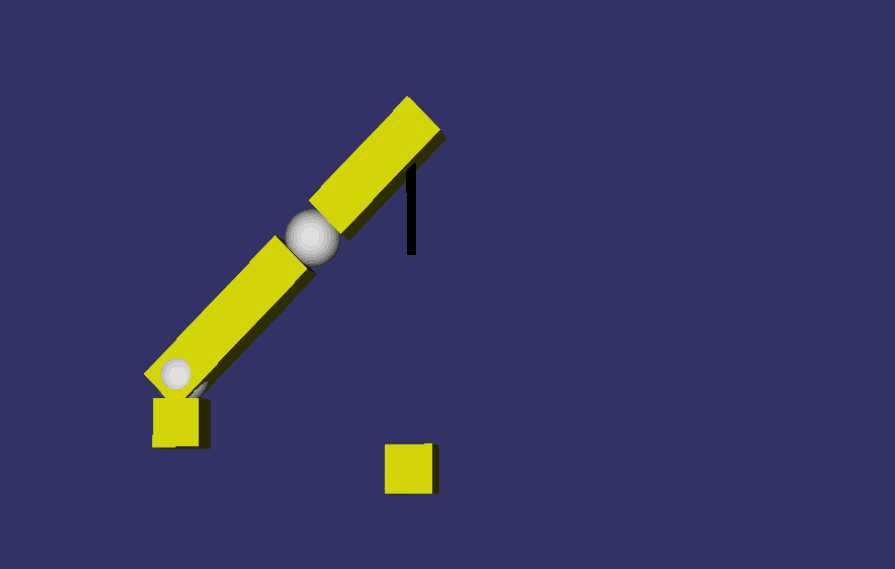
机械臂-起臂动作模拟
double cAngle = calaulateCAngle(); std::cout << "rorate cAngle:" << cAngle << std::endl; for (double d1=0.0;d1<cAngle;d1+=2.0) { if (cAngle-d1>2.0) { rorate3 += 2.0; rotateRope = -2.0; } else { double d_1 = cAngle - d1; rorate3 += d_1; rotateRope = -d_1; } rotate3(); rotateRope1(); printHookPosition(); OpenThreads::Thread::microSleep(1 * 50000); viewer1->frame(); }
标签:ror rate pos int src 自由度 class span mamicode
原文地址:https://www.cnblogs.com/herd/p/11420059.html