标签:for 等于 col 识别 mit 拆分 模式 最快 函数
对数据空间(Bin)进行量化
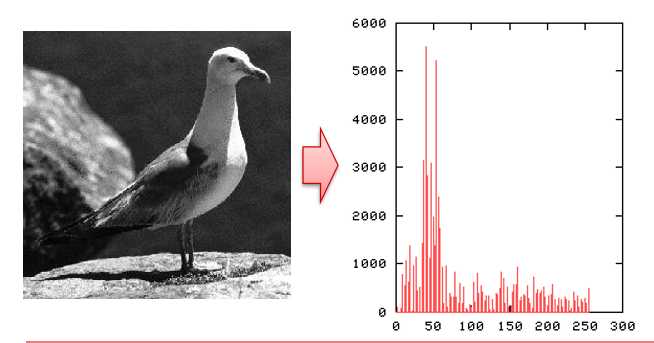
人工分割:简单高效,但是存在量化问题,量化过宽容易造成精度的损失或者量化过窄容易过拟合
边缘(Edge)
** 像素明显变化的区域
** 具有丰富的语义信息
用于物体识别和几何、视角变化
一般边缘定义为:像素值函数快速变化的区域-->一阶导数(灰度值函数)的极值区域
边缘提取:
** 先高斯去噪,在使用一阶导数获取极值(导数对噪声敏感)
** 梯度幅值/强度:
$ h_{x}{{(x,y)}^{2}}+h_{y}{{(x,y)}^{2}} $
** 梯度(增加最快)方向
$ \arctan (\frac{h_{y}(x,y)}{h_{x}(x,y)}) $
其中:$ h_{y}(x,y)=\frac{\partial h(x,y)}{\partial y}$, \(h(x,y)\)为二维高斯函数
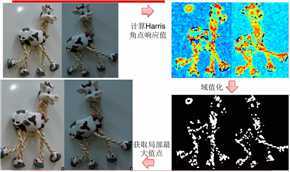
** 一种显著点,在任意方向上移动一个小的观察窗,会导致大的像素变动
** 数学模型:取偏移\((u, v)\)后窗内图像变化,取\(E(u, v)\)大的patch:
\(E\left( u,v \right)=\sum\limits_{x,y}{w\left( x,y \right){{[I\left( x+u,y+v \right)-I\left( x,y \right)]}^{2}}}\)
其中,\(w(x,y)\)为窗函数,e.g., 高斯或者矩形函数
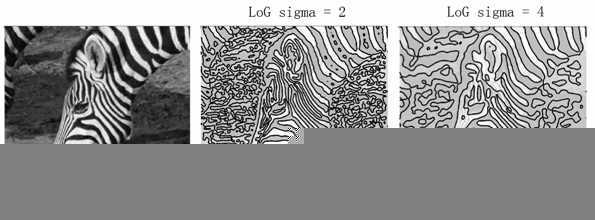
** 尺度空间
*** 使用不同标准差 \(\sigma\)的LOG对图片进行滤波
\({{\nabla }^{2}}L\left( x,y,\sigma \right)={{\nabla }^{2}}G\left( x,y,\sigma \right)*I\left( x,y \right)\)
*** DOG(difference of Gaussian)
**** LOG近似等于两个不同尺度\(\sigma\)的高斯差分
\(D\left( x,y,\sigma \right)=\left( G\left( x,y,k\sigma \right)-G\left( x,y,\sigma \right) \right)*I\left( x,y \right)\approx \left( k-1 \right){{\sigma }^{2}}{{\nabla }^{2}}L\left( x,y,\sigma \right)\)
** 应用
*** 计算高斯差分(LOG)尺度空间,获取极值点
*** 特征电处理
**** 位置插值
**** 去除低对比度点
**** 去除边缘点
*** 方向估计
*** 描述子提取
HOG (方向梯度直方图)
** 梯度计算
*** 分别计算水平和垂直梯度
**** 梯度幅值和方向
*** 对于彩色图片,选取梯度幅值最大的通道
** Block拆分
LBP(局部二值模式)
Gabar 滤波器组
** 该滤波器组类似于人类的视觉系统
** 频域:属于加窗傅里叶变换
** 空域: 一个高斯函数和正弦平面波的乘积
\(g\left( x,y;\lambda ,\theta ,\psi ,\sigma ,\gamma \right)=\exp \left( -\frac{{{{{x}'}}^{2}}+{{\gamma }^{2}}{{{{y}'}}^{2}}}{2{{\sigma }^{2}}} \right)\exp \left( i\left( 2\pi \frac{{{x}'}}{\lambda }+\psi \right) \right)\)
其中:\(x'=x\cos \theta + y\sin\theta\), \(y'=-x\sin \theta + y\cos\theta\)
标签:for 等于 col 识别 mit 拆分 模式 最快 函数
原文地址:https://www.cnblogs.com/tadeas/p/11450482.html