标签:mode 安全性 几何 不同 mic 移动 观测 lin recent
题目:车联网信道建模和测量的最新进展及未来挑战
这篇论文属于介绍性文章,主要介绍阐述了V2V信道的建模与测量,并提出未来V2V信道研究的挑战。
论文主要分为四个部分,第一部分是摘要和简介,讲述了这篇论文的梗概及车联网的发展情况;第二部分系统地介绍了V2V信道的测量活动,根据载波频率、频率选择性、路况环境、天线、TX和RX的运动方向、信道统计量方面分别阐述了信道测量活动;第三部分讲述了车联网中典型的模型:GBDMs(几何确定性模型)、NGSMs(非几何随机性模型)和GBSMs(几何随机性模型);(这一部分中提出的一般表达式看不懂,选择略过啦!)第四部分则是提出了未来研究的挑战:信道的非平稳性,VTD(交通密度)对信道统计量的影响,TX和RX仰角方向对信道统计量的影响。
这篇论文所掌握的知识大概就是了解了信道测量分为哪几个方向研究,以及掌握了一些不了解的专业术语。
ps:①多普勒效应:信号源相对观测点做运动时,观测到的信号频率会随着信号源的移动速度和角度的不同而发生变化。比如,当一辆救护车迎面驶来,我们会觉得声音很刺耳,而车离去时,声音的音高则会比原来低。
②在车联网系统V2V中,信号发送端与接收端同时运动;在移动蜂窝无线电系统F2M中,一端固定,另一端运动。
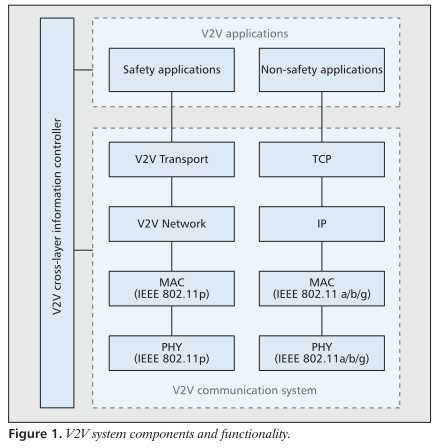
③在车联网系统中,安全性应用,遵循V2V相关协议进行数据收发;非安全应用遵循TCP/IP网络协议。
④信道测量模块:相似的环境,不同的载波频率的传播现象明显不同;
美国FCC(联邦通信协会)为DSRC在75MHz分布了七个信道,每个信道大约10MHz。V2V在宽带中类似。
信道测量环境可以分为LSS(large spatial scale 大空间)、MSS和SSS,或者可以分为城市、乡镇和高速公路。
Vehicle-to-Vehicle Channel Modeling and Measurements: Recent Advances and Future Challenges
标签:mode 安全性 几何 不同 mic 移动 观测 lin recent
原文地址:https://www.cnblogs.com/Duxue/p/11479970.html