标签:深度 数据库 检测 移除 全局 输入 open 关键点 输入参数
mapping_module在初始化系统的时候进行实例化,在构建实例的时候会实例化local_map_cleaner和local_bundle_adjuster。系统启动的时候会在另外一个线程中启动该模块。
// src/openvslam/system.cc:78
mapper_ = new mapping_module(map_db_, camera_->setup_type_ == camera::setup_type_t::Monocular);
// src/openvslam/system.cc:123
mapping_thread_ = std::unique_ptr<std::thread>(new std::thread(&openvslam::mapping_module::run, mapper_));
// src/openvslam/mapping_module.cc:128
void mapping_module::mapping_with_new_keyframe()对新增的关键帧进行建图mapping_with_new_keyframe
取出队列中最早放入的关键帧
设置原始关键帧ID
将新关键帧保存入数据库store_new_keyframe
计算当前关键帧的BoW特征向量
获取当前关键帧的lm
如果当前关键帧可以观测到该lm,将lm添加入local_map_cleaner的fresh_landmarks中
否则
添加lm的观测
更新lm几何信息
计算lm的描述子
更新图连接update_connections
获取图关键帧所有lm
统计出共视关键帧以及共视lm数量情况,筛选出共视lm大于15的关键帧weight_covisibility_pairs
寻找出共视lm数量最多的关键帧当做最近的共视关键帧
图中添加连接add_connection
对weight_covisibility_pairs进行降序排列,更新ordered_covisibilities_和ordered_weights_
更新生成树。最近的共视关键帧设置为父树,当前关键帧为子树
存储关键帧
去除冗余的lm(remove_redundant_landmarks)
移除的逻辑
1. observed_ratio小于观测门限,需要从局部地图buffer和数据库中移除;
2. 如果lm被添加之后一段时间内,被观测到的其他帧观测到的次数<=2,则认为时无效帧,需要从局部地图buffer和数据库中移除;
3. 如果lm被添加之后一段时间内被多次观测到,则认为该lm有效,只从局部地图buffer中移除;
依据当前关键帧和共视关键帧重新三角化lm(create_new_landmarks)
获取当前关键帧权重高的共视关键帧
逐个计算当前关键帧与共视关键帧之间的本质矩阵
利用本质矩阵计算出两关键帧lm的匹配情况
三角化匹配的lm,三角化成功的点将添加入库
检测处理重复的lm(update_new_keyframe)
获取两层共视关键帧
融合重复的lm(fuse_landmark_duplication)
获取当前帧的lm
逐个共视关键帧去重(replace_duplication)
如果lm没有被共视关键帧观测到
将lm重投影至该共视关键帧,提取共视关键帧投影区域附近的特征点,如果相似度很高且重投影误差很小,
使用共视关键帧的lm点取代当前的lm,如果共视关键帧没有对应的lm则把当前lm添加到共视关键帧
获取所有共视关键帧的lm集合再次进行去重(replace_duplication)
这里和上面去重输入参数是不一样的,这里的关键帧是当前关键帧,lm是共视关键帧lm集合
更新当前帧lm几何信息和图连接
进行局部地图BA(local_bundle_adjuster)
祛除冗余的关键帧remove_redundant_keyframes
获取当前关键帧的共视关键帧
逐个共视关键帧计算冗余观测count_redundant_observations
获取当前共视关键帧的lm
逐个lm统计其共视关键帧数量,如果不小于3个就认为lm是冗余的num_redundant_obs++
lm深度有效就认为是有效的lm,num_valid_obs++
如果num_redundant_obs / num_valid_obs > 0.9,则认为该共视关键帧是冗余的,移除掉
将新的关键帧发送给全局优化模块队列在跟踪模块优化局部地图optimize_current_frame_with_local_map时,首先会统计出当前帧可以被观测到的lm,会调用lm->increase_num_observable(),位姿优化后统计inlier的lm,调用lm->increase_num_observed(),因此num_observed_记录的是跟踪过程中真正有效的lm,num_observable_记录的是局部地图中可以被当前帧观测到的lm,如果num_observed_ / num_observable_的值很小的话,说明该lm对位姿评估没有太大意义,可以从局部地图buffer和数据库中清除掉。
// src/openvslam/tracking_module.cc:340
bool tracking_module::optimize_current_frame_with_local_map()和建图模块一样, 全局优化模块global_optimization_module在初始化系统的时候进行实例化,在构建实例的时候会实例化graph_optimizer、loop_detector和loop_bundle_adjuster。系统启动的时候会在另外一个线程中启动该模块。
// src/openvslam/system.cc:80
global_optimizer_ = new global_optimization_module(map_db_, bow_db_, bow_vocab_, camera_->setup_type_ != camera::setup_type_t::Monocular);
// src/openvslam/system.cc:124
global_optimization_thread_ = std::unique_ptr<std::thread>(new std::thread(&openvslam::global_optimization_module::run, global_optimizer_));
run
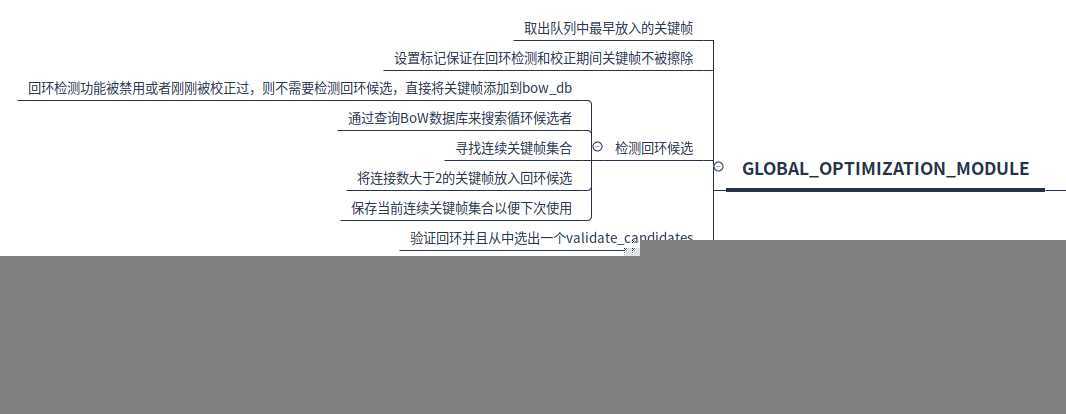
取出队列中最早放入的关键帧
设置标记保证在回环检测和校正期间关键帧不被擦除
将关键帧传入回环检测模块
检测回环候选detect_loop_candidates
回环检测功能被禁用或者刚刚被校正过,则不需要检测回环候选,直接将关键帧添加到bow_db
1. 通过查询BoW数据库来搜索循环候选者
在查询之前,计算当前关键帧和每个共视关键帧之间的BoW相似性的最小分数
获取回环候选acquire_loop_candidates
获取与当前关键帧相连的关键帧集合(通过graph_node)
统计当前关键帧和其他关键帧共享单词数量情况
将最大共享单词数量*0.8作为最小共享单词门限
计算共享单词数满足条件的候选关键帧于当前关键帧的bow得分
挑选出不大于最小分数候选关键帧对儿score_keyfrm_pairs
计算每个候选关键帧(score_keyfrm_pairs)邻域的得分并取总和best_total_score
大于best_total_score*0.75才为有效的候选帧
没有回环候选帧将当前关键帧添加到BoW database
2. 寻找连续关键帧集合find_continuously_detected_keyframe_sets
逐个查看回环候选关键帧
获取相连的关键帧集合
检测与之前连续关键帧集合是否相连,如果相连,添加入当前连续关键帧集合
3. 将连接数大于2的关键帧放入回环候选
4. 保存当前连续关键帧集合以便下次使用
如果当前关键没有找到回环候选,那么当前帧是可以被删除的
验证回环并且从中选出一个validate_candidates
使用线性和非线性的方式评估当前关键帧和候选关键帧的sim3,挑选出回环候选帧
校正回环correct_loop
获取当前关键帧的共视关键帧
获取回环校正前的共视关键帧的Sim3s_nw
计算回环校正后的共视关键帧的Sim3s_nw
校正共视关键帧中的lm的位置信息
校正共视关键帧的位姿信息
处理回环融合带来的重复lm(replace_duplicated_landmarks)
用回环候选关键中的lm替换当前帧中的lm
使用match::fuse检测重复的关键点
获取新的连接关系,进行图优化sim3
优化的变量只有关键帧位姿,优化完成后使用优化的结果调整landmark
添加回环边
最后进行loop BA
标签:深度 数据库 检测 移除 全局 输入 open 关键点 输入参数
原文地址:https://www.cnblogs.com/hardjet/p/11564400.html