标签:while turn bsp info 包含 可视化 学习 prope cto
pcl中几种常见的点云渲染方式
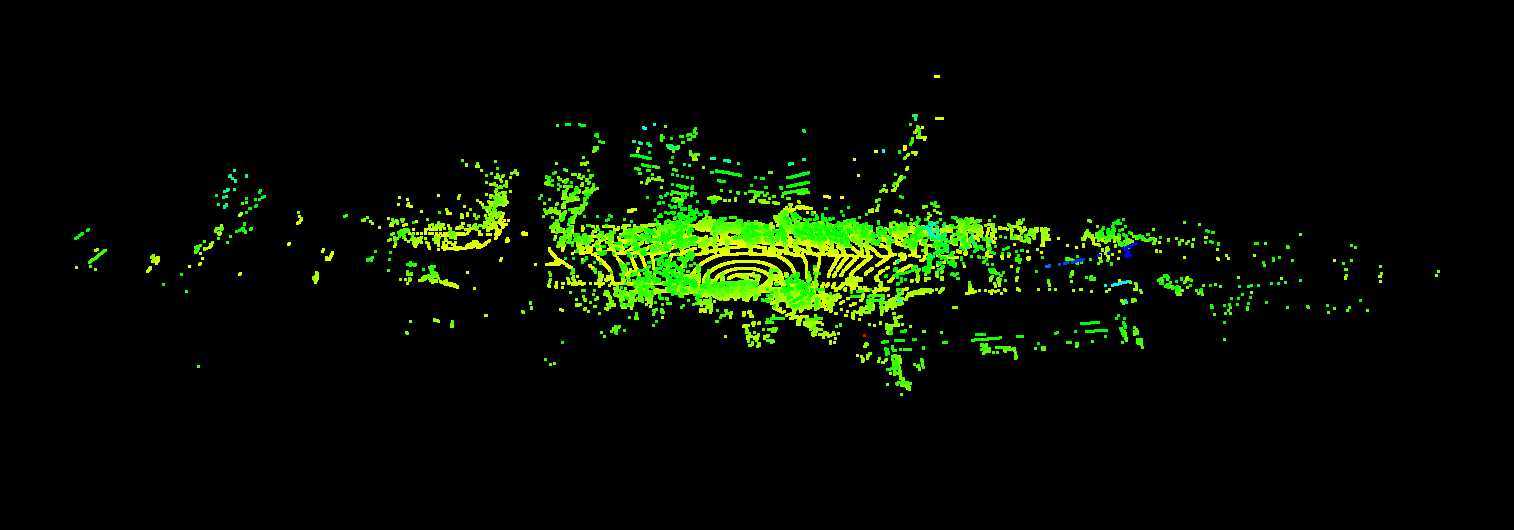
(1)颜色区别深度
此方法在PointCloudColorHandlerGenericField类中实现,该将不同的深度值显示为不同的颜色,实现以颜色区分深度的目的,PointCloudColorHandlerGenericField方法是将点云按深度值(“x”、“y”、"z"均可)的差异着以不同的颜色进行渲染。
#include <pcl/point_cloud.h> #include <pcl/point_types.h> #include <pcl/io/pcd_io.h> #include <pcl/visualization/pcl_visualizer.h> #include <vector> using namespace std; int main(int argc, char* argv[]) { pcl::PointCloud<pcl::PointXYZ>::Ptr Cloud(new pcl::PointCloud<pcl::PointXYZ>); pcl::io::loadPCDFile("./biansu.pcd", *Cloud);//读入点云数据 pcl::visualization::PCLVisualizer viewer("display"); viewer.setBackgroundColor(0, 0, 0); pcl::visualization::PointCloudColorHandlerGenericField<pcl::PointXYZ> fildColor(Cloud, "z");//按照z字段进行渲染 viewer.addPointCloud<pcl::PointXYZ>(Cloud, fildColor, "sample");//显示点云,其中fildColor为颜色显示 viewer.setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 3, "sample");//设置点云大小 while (!viewer.wasStopped()) { viewer.spinOnce(); } return 0; }
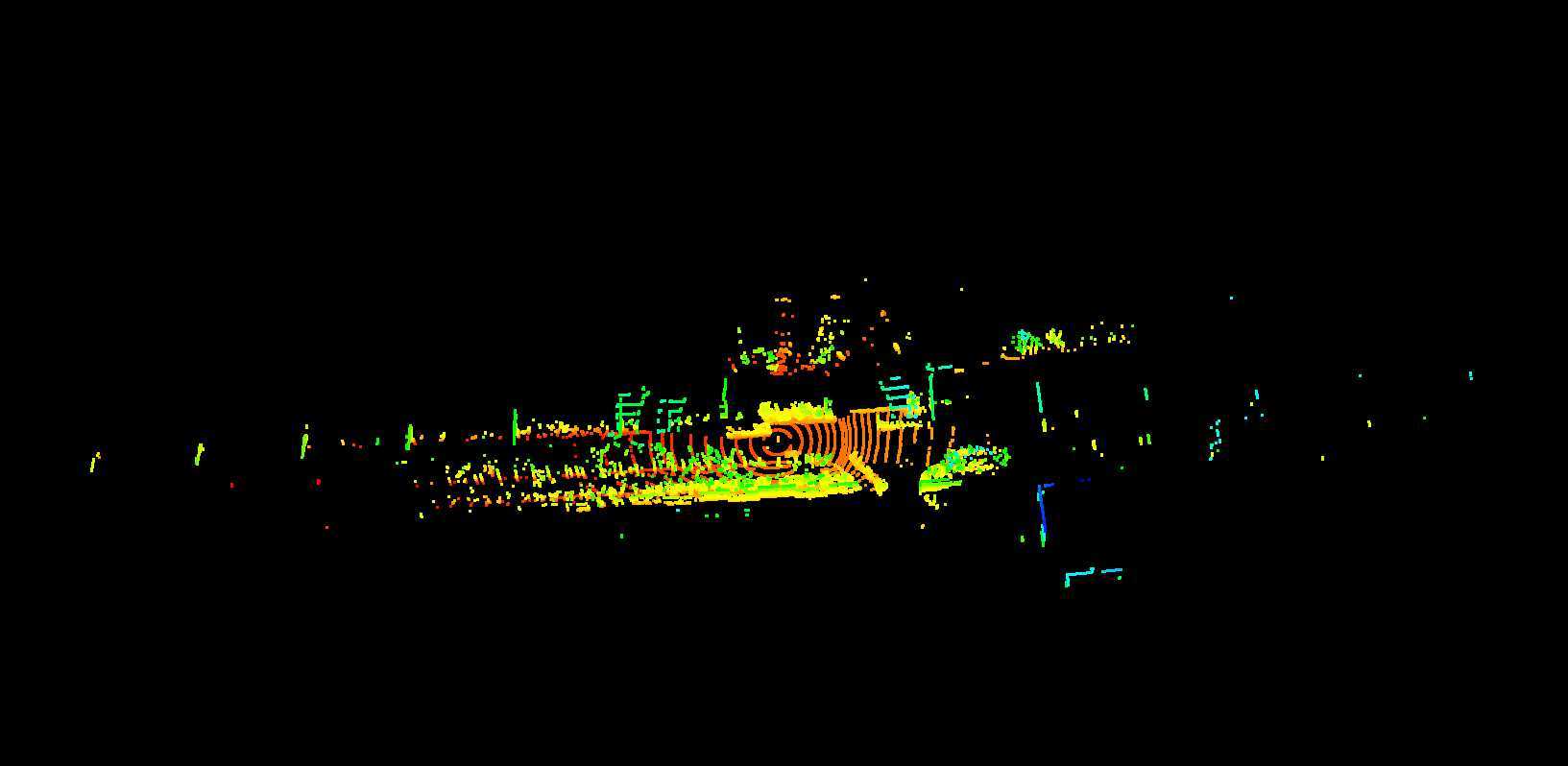
按x坐标中值显示
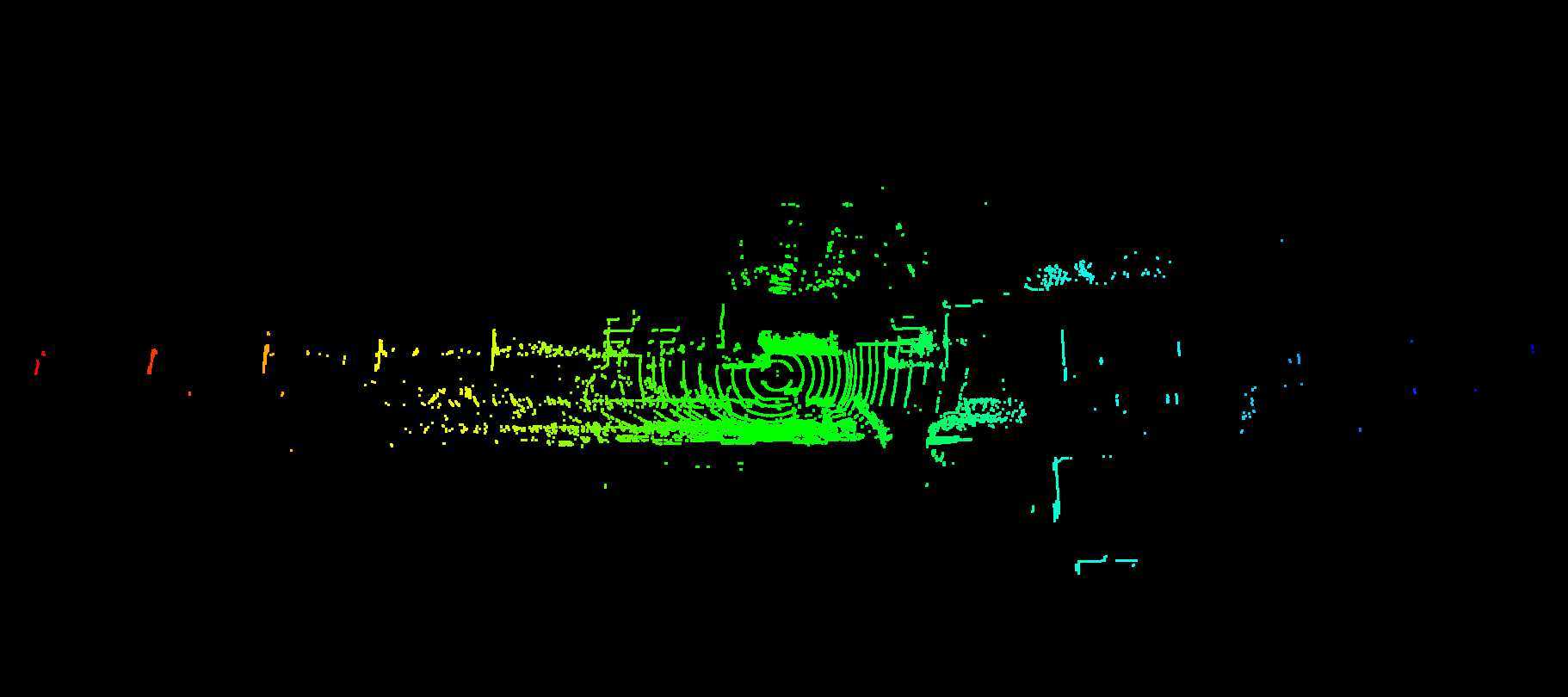
按z坐标中值显示
该方法(PointCloudColorHandlerRGBField)要求点云类型包含RGB三个颜色分量,即该方法是直接显示点云中各个点的RGB属性字段信息,而不是通过对点云着色显示不同颜色。
#include <iostream> #include <pcl/point_cloud.h> #include <pcl/point_types.h> #include <pcl/io/pcd_io.h> #include <pcl/visualization/pcl_visualizer.h> #include <pcl/io/io.h> using namespace std; using namespace pcl; using namespace io; int main() { PointCloud<PointXYZRGB>::Ptr cloud(new PointCloud<PointXYZRGB>); if (pcl::io::loadPCDFile("./biansu.pcd", *cloud) == -1) { cerr << "can‘t read file biansu.pcd" << endl; return -1; } boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer(new pcl::visualization::PCLVisualizer("3D Viewer")); pcl::visualization::PointCloudColorHandlerRGBField<pcl::PointXYZRGB> rgb(cloud); viewer->addPointCloud<pcl::PointXYZRGB>(cloud, "biansu cloud"); viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 3, "biansu cloud"); // 设置点云大小 while (!viewer->wasStopped()) { viewer->spinOnce(100); boost::this_thread::sleep(boost::posix_time::microseconds(100000)); } return 0; }
显示结果如下:
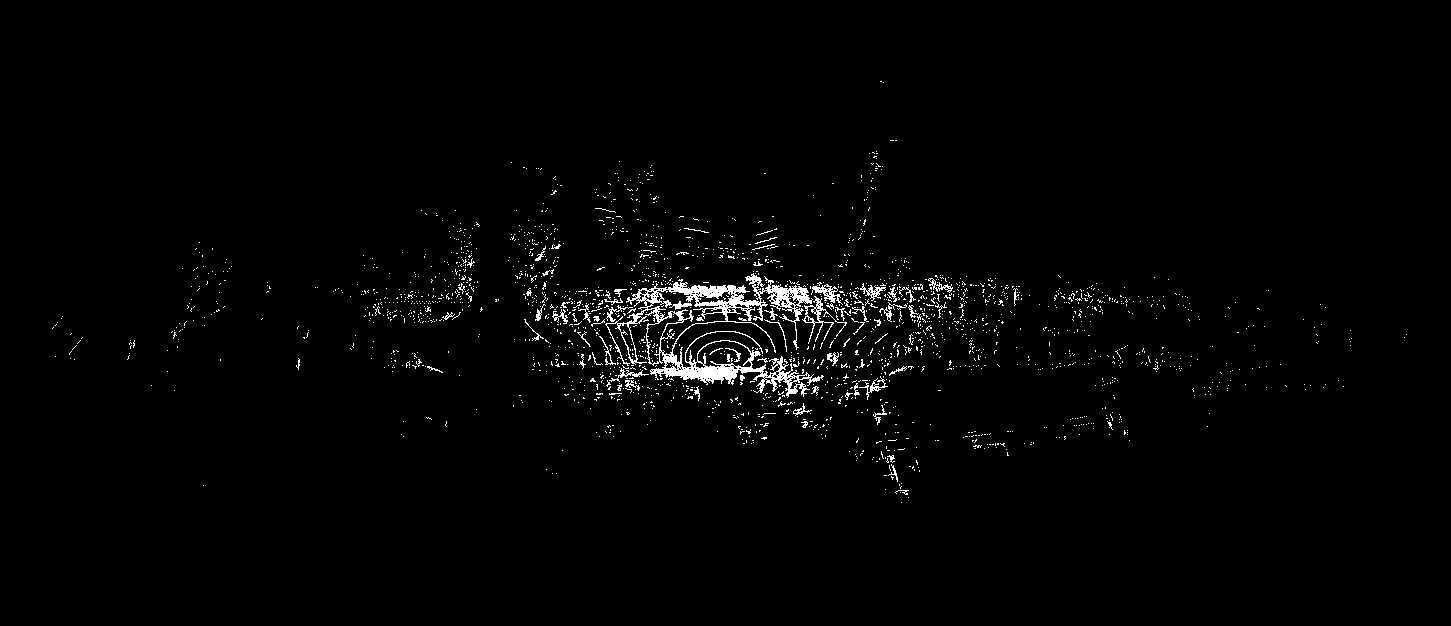
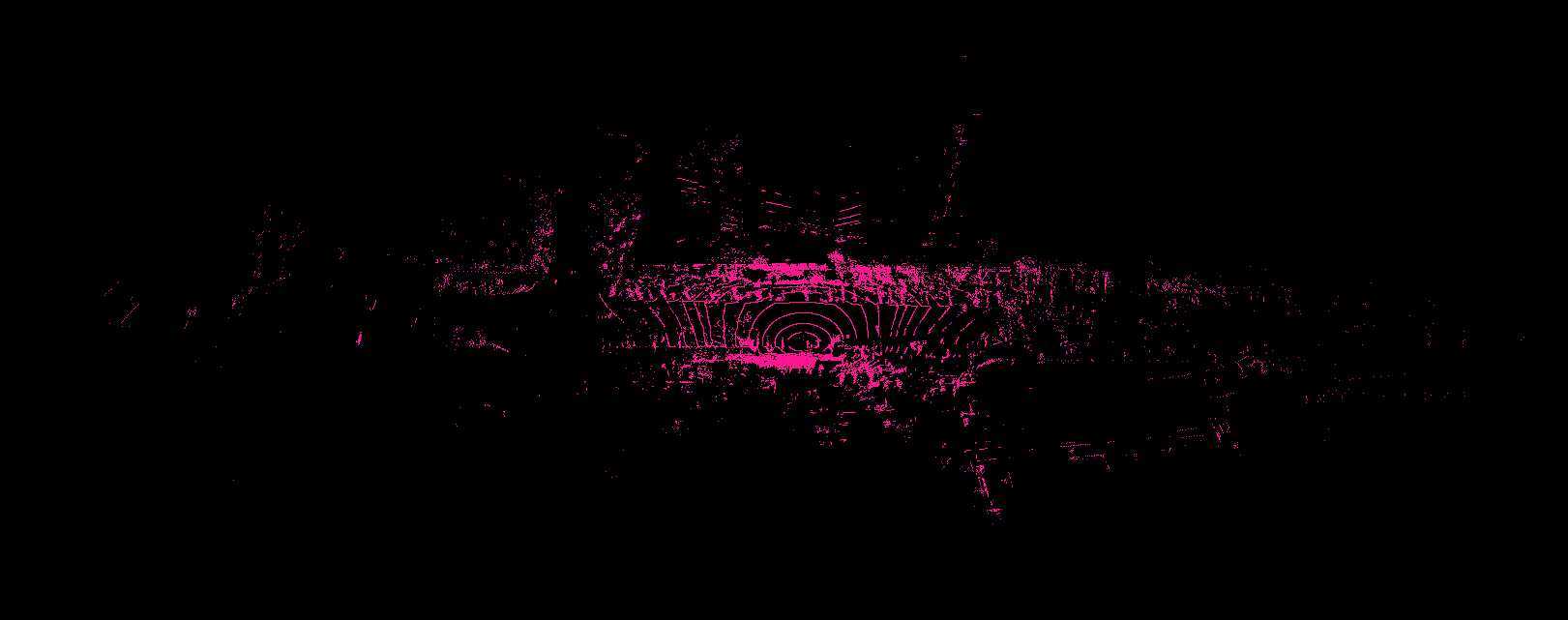
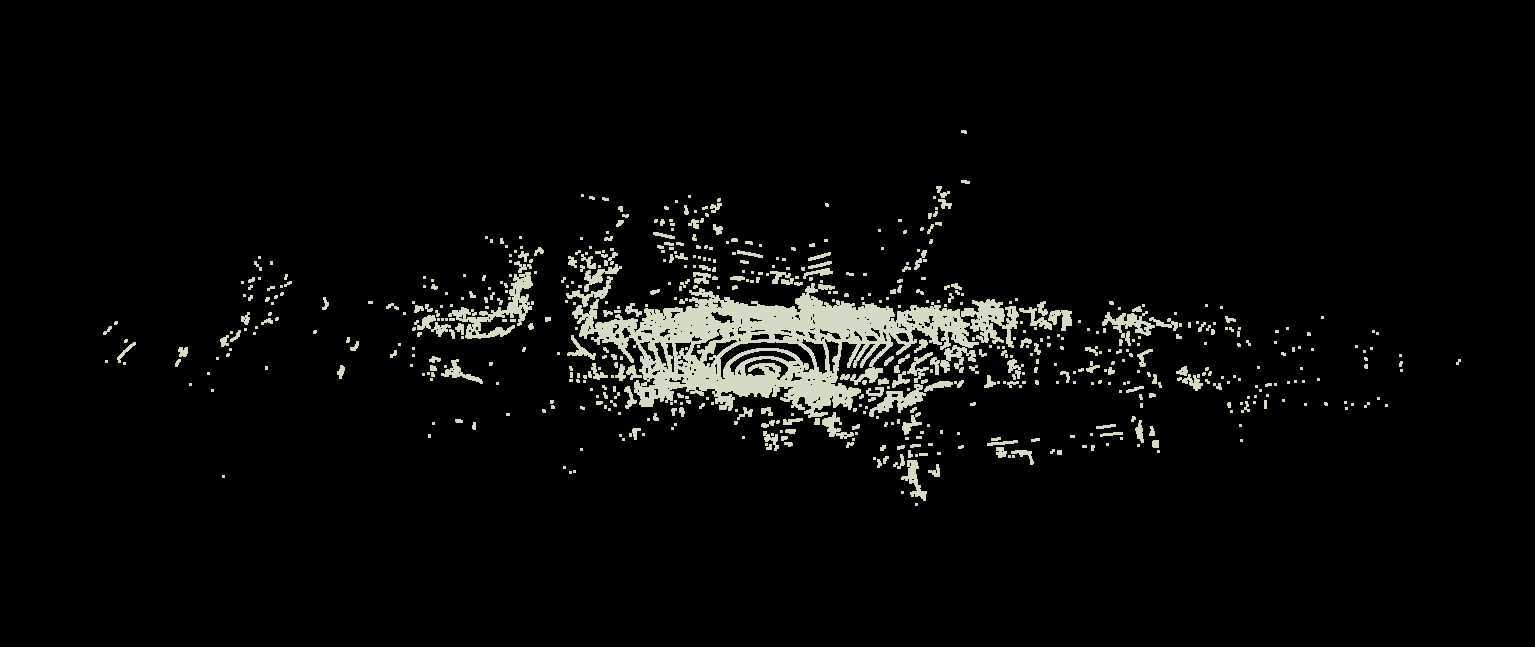
该方法(PointCloudColorHandlerCustom)适用于任何格式点云,不要求点云类型包含RGB三个颜色分量,即将id为"sample cloud"的点云作为一个整体进行着色。
#include <iostream> #include <pcl/point_cloud.h> #include <pcl/point_types.h> #include <pcl/io/pcd_io.h> #include <pcl/visualization/pcl_visualizer.h> #include <pcl/io/io.h> using namespace pcl; using namespace io; int main() { PointCloud<PointXYZ>::Ptr cloud(new PointCloud<PointXYZ>); if (pcl::io::loadPCDFile("./biansu.pcd", *cloud) == -1) { std::cerr << "can‘t read file biansu.pcd" << endl; return -1; } boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer(new pcl::visualization::PCLVisualizer("3D Viewer")); pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> single_color(cloud, 255,20,147); //DeepPink viewer->addPointCloud<pcl::PointXYZ>(cloud, single_color, "sample cloud"); // viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_COLOR, 0,1,1, "sample cloud"); //这也是一种设置颜色的方法,0,1,1是r,g,b除以255后的值 viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 3, "sample");//设置点云大小
while (!viewer->wasStopped()) { viewer->spinOnce(100); boost::this_thread::sleep(boost::posix_time::microseconds(100000)); } return 0; }
(4)随机生成颜色
#include <iostream> #include <pcl/point_cloud.h> #include <pcl/point_types.h> #include <pcl/io/pcd_io.h> #include <pcl/visualization/pcl_visualizer.h> #include <pcl/io/io.h> using namespace pcl; using namespace io; int main(int argc, char* argv[]) { pcl::PointCloud<pcl::PointXYZ>::Ptr Cloud(new pcl::PointCloud<pcl::PointXYZ>); pcl::io::loadPCDFile("./biansu.pcd", *Cloud); pcl::visualization::PCLVisualizer viewer("biansu"); viewer.setBackgroundColor(0, 0, 0); pcl::visualization::PointCloudColorHandlerRandom<pcl::PointXYZ> RandomColor(Cloud); viewer.addPointCloud<pcl::PointXYZ>(Cloud, RandomColor, "sample"); viewer.setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 3, "sample"); while (!viewer.wasStopped()) { viewer.spinOnce(); } return 0; }
结果为:
(4)法向量的颜色表示
#include <pcl/point_types.h> #include <pcl/io/pcd_io.h> #include <pcl/kdtree/kdtree_flann.h> #include <pcl/features/normal_3d.h> #include <pcl/surface/gp3.h> #include <pcl/visualization/pcl_visualizer.h> int main() { pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>); pcl::io::loadPCDFile("./biansu.pcd", *cloud);//读入点云数据 // Normal estimation* pcl::NormalEstimation<pcl::PointXYZ, pcl::Normal> n; pcl::PointCloud<pcl::Normal>::Ptr normals(new pcl::PointCloud<pcl::Normal>); //建立kdtree来进行近邻点集搜索 pcl::search::KdTree<pcl::PointXYZ>::Ptr tree(new pcl::search::KdTree<pcl::PointXYZ>); //为kdtree添加点云数据 tree->setInputCloud(cloud); n.setInputCloud(cloud); n.setSearchMethod(tree); //点云法向计算时,需要搜索的近邻点大小 n.setKSearch(20); //开始进行法向计算 n.compute(*normals); //* normals should not contain the point normals + surface curvatures //显示类 pcl::visualization::PCLVisualizer viewer("Cloud Viewer"); //设置背景色 viewer.setBackgroundColor(0, 0, 0); //按照z值进行渲染点的颜色 pcl::visualization::PointCloudColorHandlerGenericField<pcl::PointXYZ> fildColor(cloud, "z"); //添加需要显示的点云数据 viewer.addPointCloud<pcl::PointXYZ>(cloud, fildColor, "sample cloud"); //设置点显示大小 viewer.setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 3, "sample cloud"); //添加需要显示的点云法向。cloud为原始点云模型,normal为法向信息,1表示需要显示法向的点云间隔,即每1个点显示一次法向,0.01表示法向长度。 viewer.addPointCloudNormals<pcl::PointXYZ, pcl::Normal>(cloud, normals, 1, 0.01, "normals"); while (!viewer.wasStopped()) { viewer.spinOnce(); } }
结果为:
标签:while turn bsp info 包含 可视化 学习 prope cto
原文地址:https://www.cnblogs.com/kerngeeksund/p/11569258.html