标签:举例 war ati val 一个 for 动态 cat 产生
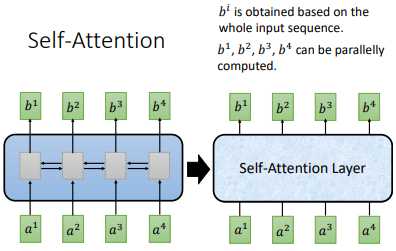
之前的RNN输入是难以并行化的,我们下一个输入可能依赖前一个输出,只有知道了前面的输出才能计算后面的输出。
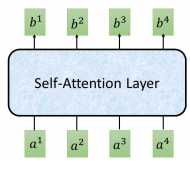
于是提出了 self-attention ,但是这时候 $b^{i}$ 能够并行化计算
我们的输入 $x^{i}$,先经过一个Embedding,变成 $a^{i}$ ,然后丢进 self-attention 层中。如上图所示。
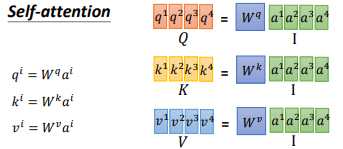
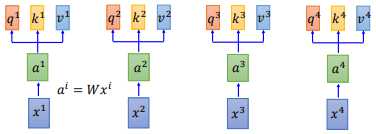
在self-attention中,我们的 $a^{i}$ 都乘上3个不同的矩阵,进行 transformation,得到3个不同的向量,分别是 $q$、$k$ 和 $v$。
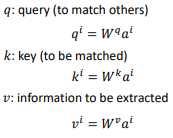 $q$ 是query,它要去match的。$k$ 是key,用来被 $q$ match的;$v$ 是value,它是要被抽取出来的information。现在我们的每一个timestamp都有一个 $q$、$k$ 和 $v$ 这3个不同的向量。
$q$ 是query,它要去match的。$k$ 是key,用来被 $q$ match的;$v$ 是value,它是要被抽取出来的information。现在我们的每一个timestamp都有一个 $q$、$k$ 和 $v$ 这3个不同的向量。
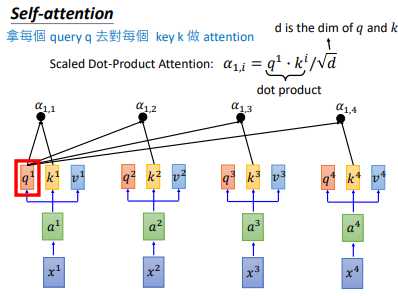
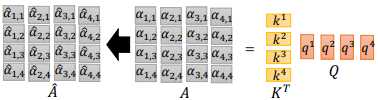
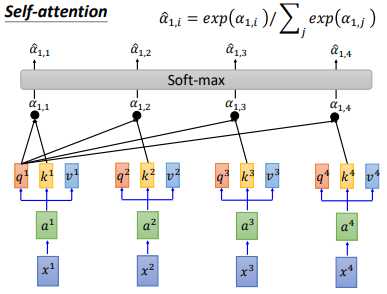
接下来我们对拿每一个 $q$ 对每一个 $k$ 做attention。如上图所示,$q^{1}$ 和 $k^{1}$ 做attention,得到 $\alpha _{1,1}$,下标(1,1)表示 $q^{1}$ 和 $k^{1}$ 的attention
attention有许多算法,它做的本质事情就是 吃 两个向量,输出一个分数,这个分数表明两个向量有多匹配
然后 $q^{1}$ 和 $k^{i}$ 计算得到 $\alpha _{1,i}$ ,计算公式和计算示意图如上图所示。然后我们会把得到的 $\alpha _{1,i}$ 经过一个softmax,得到 $\hat{\alpha }_{1,i}$,如下图所示
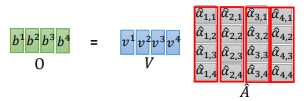
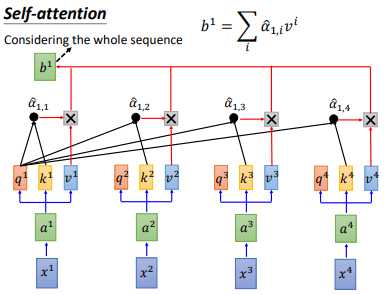
得到 $\hat{\alpha }_{1,i}$ 后,让 $\hat{\alpha }_{1,i}$ 分别乘以 $v^{i}$后累加,得到 $b^{1}$,我们输出 sequence 的第一个向量就是 $b^{1}$。但可以发现我们产生 $b^{1}$ 就已经使用了整个 sequence 的信息。
self-attention 输入是一个 sequence,输出也是sequence
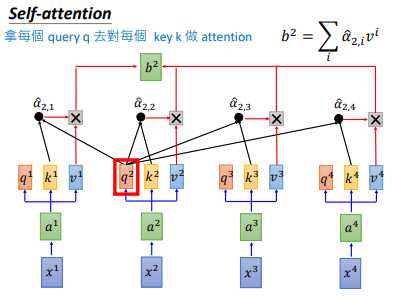
其他 $b^{i}$ 也是同样的计算流程,可以并行计算,比如 $b^{2}$,这样就得到了输出sequence的第二个向量
论文中的公式:$Attention(Q,K,V)=softmax(\frac{QK^{T}}{\sqrt{d_{k}}})V$
Q、K、V是矩阵各个向量拼接而成的矩阵,整个矩阵计算的示意图如下图所示
从上面可以看到,self-attention 就是一连串矩阵运算。
我们用 2 heads 的情况举例,这种情况下,我们的 $q^{i}$ 会分裂成两个—— $q^{i,1}$ 和 $q^{i,2}$。
实际中 head 的数目也是参数,可以调
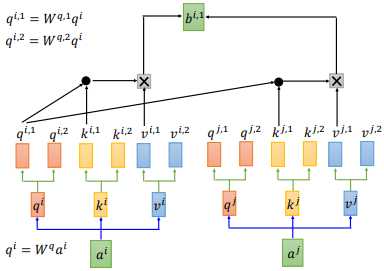
然后 $q^{i,1}$ 和 $k^{i,1}$ 、$k^{j,1}$ 分别计算 attention,最后计算出 $b^{i,1}$,如上图所示。用同样的步骤计算出 $b^{i,1}$ 和 $b^{i,2}$,把它们两个 concat 后乘以一个矩阵 $W^{o}$ ,得到 $b^{i}$。
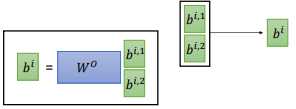
论文中的公式:$Multi-Head(Q,K,V)=Concat(head_{1},...,head_{h})W^{o}$
其中$head_{i}=Attention(QW^{Q}_{i},KW^{K}_{i},VW^{V}_{i})$
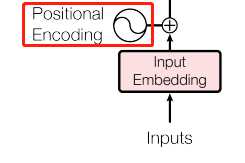
但是 self-attention 没有用到 sequence 的位置信息
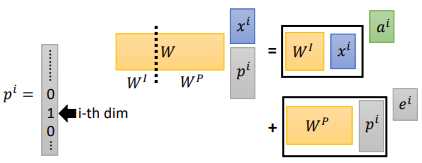
所以在输入 $x^{i}$ 经过 transformation 得到 $a^{i}$ 后,还要加上一个 $e^{i}$, $e^{i}$ 是人工设置的,这个 $e^{i}$ 代表了位置信息。
论文3.5节Positional Encoding
 定义这个向量的方式有多种多样。 比如,用 $p^{i}$ 表示位置信息,让 $p^{i}$ 和一个矩阵 $W^{p}$ 相乘得到的就是我们的 $e^{i}$
定义这个向量的方式有多种多样。 比如,用 $p^{i}$ 表示位置信息,让 $p^{i}$ 和一个矩阵 $W^{p}$ 相乘得到的就是我们的 $e^{i}$
下面是做 self-attention 的一个动态示意图。可以看到 encoder 阶段 self-attention 是并行的且用到了所有单词的信息。

transformer 模型架构图如下图所示,对 encoder 和 decoder 使用了 self-attention 机制
左边是 encoder ,右边是 decoder
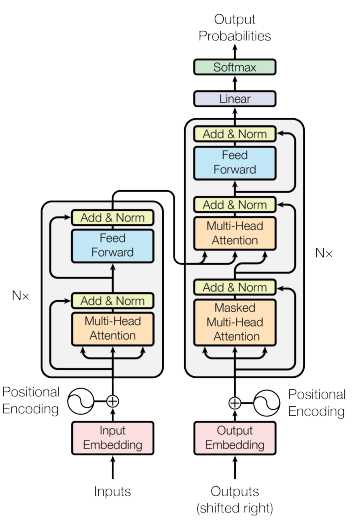
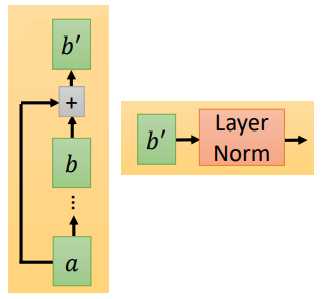
encoder 是左边灰色的图块,它可以重复 N 次,在 encoder 中,有一个 Multi-Head Attention 层,根据前面了解到的信息。这层的输入是一个 sequence,输出也是一个 sequence。如下图所示。
 然后再经过 Add & Norm。Add 指我们会把 Multi-Head Attention 的输入和输出加起来得到 $b‘$,Norm指我们会把得到的 $b‘$ 做 Layer Norm。
然后再经过 Add & Norm。Add 指我们会把 Multi-Head Attention 的输入和输出加起来得到 $b‘$,Norm指我们会把得到的 $b‘$ 做 Layer Norm。
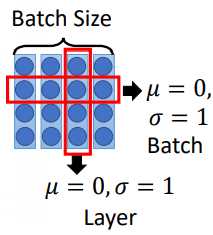
Layer Norm 和 Batch Norm 的不同:
在做 Batch Norm 的时候,在同一个 batch 里面,对不同 data 同样的 dimension 做 normalization,希望整个 batch 里面同一个 dimension 的均值为0,方差为1。
Layer Norm 是给一组 data,我们希望不同 dimension 的均值为0,方差为1。如下图所示
之后再经过 Feed Forward ,它对刚刚的输出进行处理,然后再经过一个 Add & Norm。
下面看看右边的 decoder ,它也可以重复 N 次。
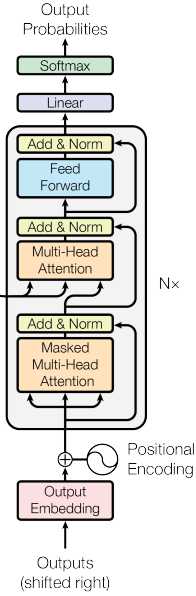
它的输入是上一个 tiemstamp 的输出,同样经过 embedding 和 positional encoding 后进入 decoder 中。decoder 的第一层是 Masked Multi-Head Attention,Masked 是说我们在做 self-attention 的时候这个 decoder 只会 attend 到它已经产生出来的 sequence。然后经过 Add & Norm ,再经过 Multi-Head,这个 Multi-Head Attention 会 attend 到之前 encoder 的输出,……,然后输出。
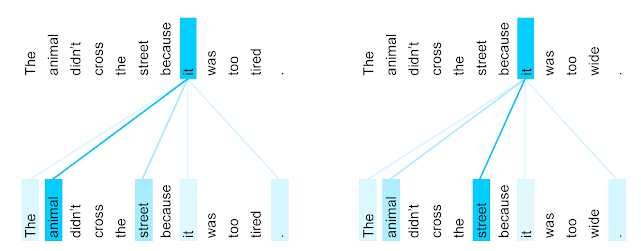
上面这张图显示了英语到法语翻译(eight attention heads之一)训练的 transformer 第5层到第6层中encoder 的 “it” 一词的 self-attention 分布。
可以看到 “it” attend 到了 animal,可以看到我们的模型自动学到了在做 attention 时,“it” 要 attend 到 “animal”。
当我们只改动左边的一个单词,把 tired 改为 wide。这句子里 “it” 再指动物,而是指 street,说它太宽了,我们的模型也能 attend 到 street。
详细文章:https://ai.googleblog.com/2017/08/transformer-novel-neural-network.html
标签:举例 war ati val 一个 for 动态 cat 产生
原文地址:https://www.cnblogs.com/dogecheng/p/11614843.html