标签:png 监视 ogre mamicode out 硬件 sans put 串口
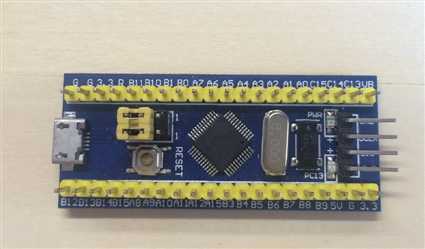
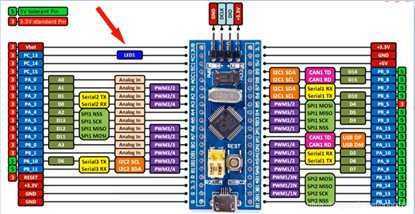
除了 PA11和PA12其他都可以
void setup() {
pinMode(PC13, OUTPUT);
pinMode(PC14, OUTPUT);
pinMode(PC15, OUTPUT);
pinMode(PA0, OUTPUT);
pinMode(PA1, OUTPUT);
pinMode(PA2, OUTPUT);
pinMode(PA3, OUTPUT);
pinMode(PA4, OUTPUT);
pinMode(PA5, OUTPUT);
pinMode(PA6, OUTPUT);
pinMode(PA7, OUTPUT);
pinMode(PA8, OUTPUT);
pinMode(PA9, OUTPUT);
pinMode(PA10, OUTPUT);
// pinMode(PA11, OUTPUT); // CAN t0 不能用
// pinMode(PA12, OUTPUT); // CAN r0 不能用
pinMode(PA15, OUTPUT);
pinMode(PB0, OUTPUT);
pinMode(PB1, OUTPUT);
pinMode(PB2, OUTPUT);
pinMode(PB3, OUTPUT);
pinMode(PB4, OUTPUT);
pinMode(PB5, OUTPUT);
pinMode(PB6, OUTPUT);
pinMode(PB7, OUTPUT);
pinMode(PB8, OUTPUT);
pinMode(PB9, OUTPUT);
pinMode(PB10, OUTPUT);
pinMode(PB11, OUTPUT);
pinMode(PB12, OUTPUT);
pinMode(PB13, OUTPUT);
pinMode(PB14, OUTPUT);
pinMode(PB15, OUTPUT);
}
void loop() {
digitalWrite(PC13, HIGH);
digitalWrite(PC14, HIGH);
digitalWrite(PC15, HIGH);
digitalWrite(PA0, HIGH);
digitalWrite(PA1, HIGH);
digitalWrite(PA2, HIGH);
digitalWrite(PA3, HIGH);
digitalWrite(PA4, HIGH);
digitalWrite(PA5, HIGH);
digitalWrite(PA6, HIGH);
digitalWrite(PA7, HIGH);
digitalWrite(PA8, HIGH);
digitalWrite(PA9, HIGH);
digitalWrite(PA10, HIGH);
// digitalWrite(PA11, HIGH);
// digitalWrite(PA12, HIGH);
digitalWrite(PA15, HIGH);
digitalWrite(PB0, HIGH);
digitalWrite(PB1, HIGH);
digitalWrite(PB2, HIGH);
digitalWrite(PB3, HIGH);
digitalWrite(PB4, HIGH);
digitalWrite(PB5, HIGH);
digitalWrite(PB6, HIGH);
digitalWrite(PB7, HIGH);
digitalWrite(PB8, HIGH);
digitalWrite(PB9, HIGH);
digitalWrite(PB10, HIGH);
digitalWrite(PB11, HIGH);
digitalWrite(PB12, HIGH);
digitalWrite(PB13, HIGH);
digitalWrite(PB14, HIGH);
digitalWrite(PB15, HIGH);
delay(1000);
digitalWrite(PC13, LOW);
digitalWrite(PC14, LOW);
digitalWrite(PC15, LOW);
digitalWrite(PA0, LOW);
digitalWrite(PA1, LOW);
digitalWrite(PA2, LOW);
digitalWrite(PA3, LOW);
digitalWrite(PA4, LOW);
digitalWrite(PA5, LOW);
digitalWrite(PA6, LOW);
digitalWrite(PA7, LOW);
digitalWrite(PA8, LOW);
digitalWrite(PA9, LOW);
digitalWrite(PA10, LOW);
// digitalWrite(PA11, LOW);
// digitalWrite(PA12, LOW);
digitalWrite(PA15, LOW);
digitalWrite(PB0, LOW);
digitalWrite(PB1, LOW);
digitalWrite(PB2, LOW);
digitalWrite(PB3, LOW);
digitalWrite(PB4, LOW);
digitalWrite(PB5, LOW);
digitalWrite(PB6, LOW);
digitalWrite(PB7, LOW);
digitalWrite(PB8, LOW);
digitalWrite(PB9, LOW);
digitalWrite(PB10, LOW);
digitalWrite(PB11, LOW);
digitalWrite(PB12, LOW);
digitalWrite(PB13, LOW);
digitalWrite(PB14, LOW);
digitalWrite(PB15, LOW);
delay(1000);
}
PWM引脚简易测试程序,总共有12个PWM引脚,16bit即65536级PWM,很精密了:
延迟给100微妙 多了少了都有问题,不正常转
void setup()
{
pinMode(PB0, PWM);
pinMode(PA7, PWM);
pinMode(PA6, PWM);
pinMode(PA3, PWM);
pinMode(PA2, PWM);
pinMode(PA1, PWM);
pinMode(PA0, PWM);
pinMode(PB7, PWM);
pinMode(PB6, PWM);
pinMode(PA10, PWM);
pinMode(PA9, PWM);
pinMode(PA8, PWM);
}
void loop()
{
for (int i = 1000; i < 65536; i++)
{
//delayMicroseconds(100);
// delay(1);
delay(20);
pwmWrite(PB0, i);
pwmWrite(PA7, i);
pwmWrite(PA6, i);
pwmWrite(PA3, i);
pwmWrite(PA2, i);
pwmWrite(PA1, i);
pwmWrite(PA0, i);
pwmWrite(PB7, i);
pwmWrite(PB6, i);
pwmWrite(PA10, i);
pwmWrite(PA9, i);
pwmWrite(PA8, i);
}
for (int i = 65536; i > 1000; i--)
{
// delayMicroseconds(100);
// delay(1);
delay(20);
pwmWrite(PB0, i);
pwmWrite(PA7, i);
pwmWrite(PA6, i);
pwmWrite(PA3, i);
pwmWrite(PA2, i);
pwmWrite(PA1, i);
pwmWrite(PA0, i);
pwmWrite(PB7, i);
pwmWrite(PB6, i);
pwmWrite(PA10, i);
pwmWrite(PA9, i);
pwmWrite(PA8, i);
}
}
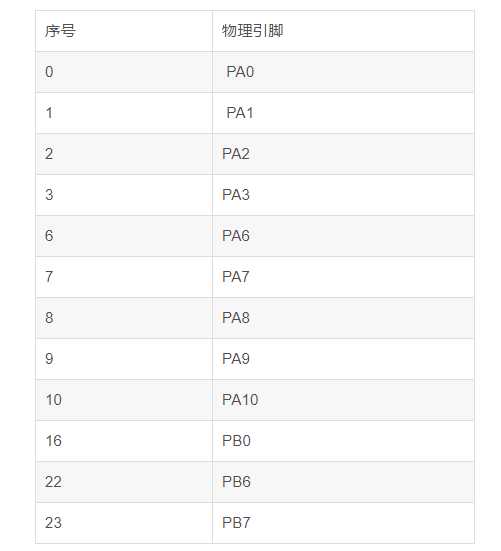
int pins[12] = {0, 1, 2, 3, 6, 7, 8, 9, 10, 16, 22, 23};
void setup()
{
for (int i = 0; i < 12; i++)
{
pinMode(pins[i], PWM);
}
}
void loop()
{
for (int i = 0; i < 100; i++)
{
for (int j = 0; j < 12; j++)
{
pwmWrite(pins[j], i * i);
}
delay(20);
}
}
int value = digitalRead(pin);
实际测试 0-4096 2的10次方

在pa7接一个光敏电阻,完全遮盖4095 手机强光基本几十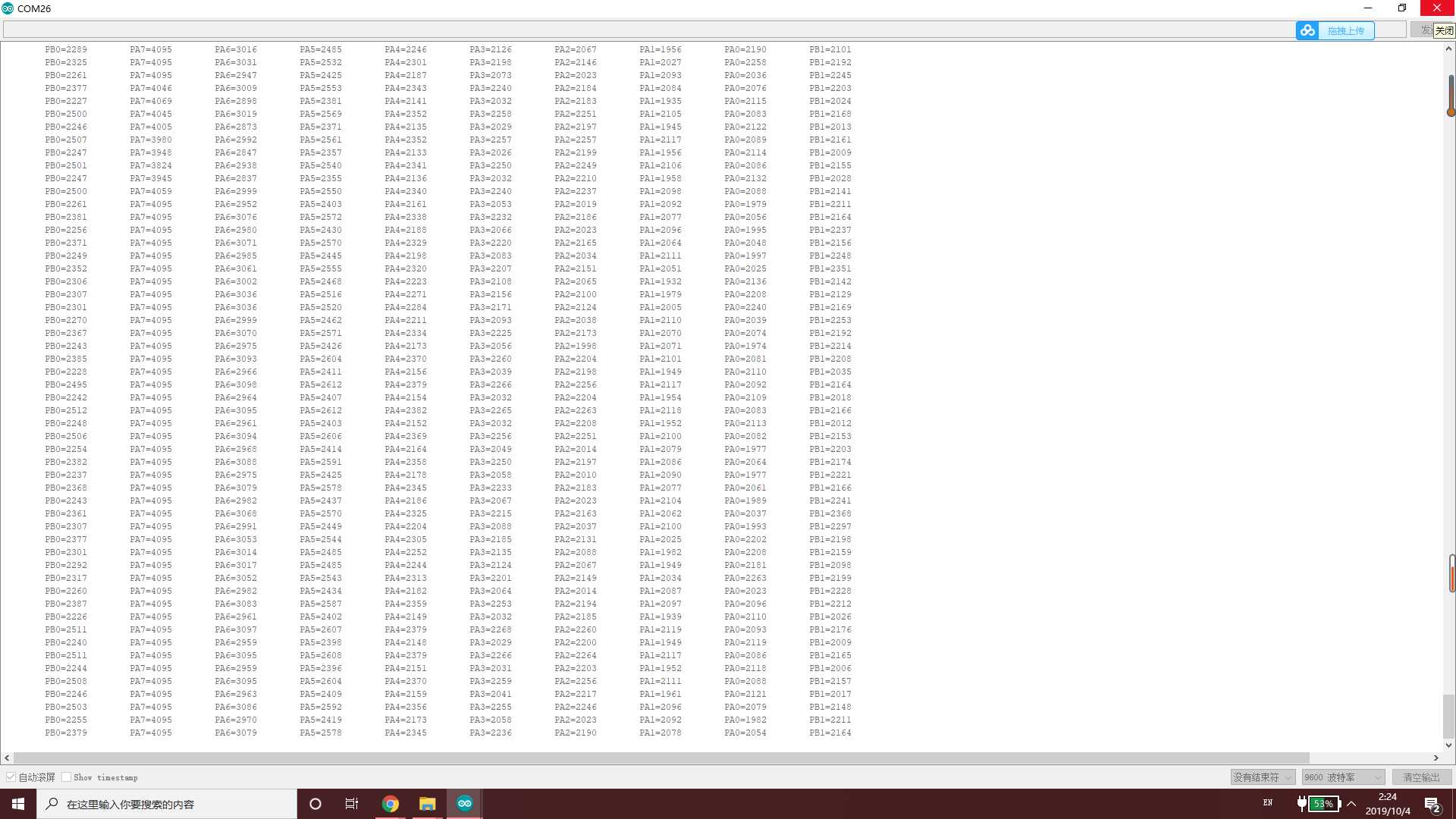
void setup()
{
Serial.begin(115200);
pinMode(PB0, INPUT_ANALOG);
pinMode(PA7, INPUT_ANALOG);
pinMode(PA6, INPUT_ANALOG);
pinMode(PA5, INPUT_ANALOG);
pinMode(PA4, INPUT_ANALOG);
pinMode(PA3, INPUT_ANALOG);
pinMode(PA2, INPUT_ANALOG);
pinMode(PA1, INPUT_ANALOG);
pinMode(PA0, INPUT_ANALOG);
pinMode(PB1, INPUT_ANALOG);
}
void loop()
{
delay(50);
Serial.print("\tPB0="); Serial.print(analogRead(PB0));
Serial.print("\tPA7="); Serial.print(analogRead(PA7));
Serial.print("\tPA6="); Serial.print(analogRead(PA6));
Serial.print("\tPA5="); Serial.print(analogRead(PA5));
Serial.print("\tPA4="); Serial.print(analogRead(PA4));
Serial.print("\tPA3="); Serial.print(analogRead(PA3));
Serial.print("\tPA2="); Serial.print(analogRead(PA2));
Serial.print("\tPA1="); Serial.print(analogRead(PA1));
Serial.print("\tPA0="); Serial.print(analogRead(PA0));
Serial.print("\tPB1="); Serial.println(analogRead(PB1));
}
void onChange()
{
if ( digitalRead(PA8) == LOW )
Serial.println("Key Down");
else
Serial.println("Key UP");
}
void setup()
{
Serial.begin(9600); //打开串口
pinMode( PA8, INPUT);//设置管脚为输入
//Enable中断管脚, 中断服务程序为onChange(), 监视引脚变化
/*
LOW 低电平触发
CHANGE 电平变化,高电平变低电平、低电平变高电平
RISING 上升沿触发
FALLING 下降沿触发
HIGH 高电平触发(该中断模式仅适用于Arduino due)
*/
attachInterrupt( PA8, onChange, CHANGE);
}
void loop()
{
// 模拟长时间运行的进程或复杂的任务。
for (int i = 0; i < 100; i++)
{
// 什么都不做,等待10毫秒
delay(10);
}
}
总共3个硬件外接串口Serial1、Serial2、Serial3,一个USB虚拟串口Serial:
void setup()
{
Serial.begin(115200);
Serial1.begin(115200); //TX=PA9,RX=PA10
Serial2.begin(115200); //TX=PA2,RX=PA3
Serial3.begin(115200); //TX=PB10,RX=PB11
}
void loop()
{
delay(100);
Serial.println("Test Serial");
Serial1.println("Test Serial1");
Serial2.println("Test Serial2");
Serial3.println("Test Serial3");
}
标签:png 监视 ogre mamicode out 硬件 sans put 串口
原文地址:https://www.cnblogs.com/kekeoutlook/p/11621260.html