标签:对象 hand 执行命令 get 包含 share 部分 target 文件名
在上一篇文章中,我们实现了第一个ROS程序—发布器(publisher),然而在上一篇文章的最后我们也注意到,尽管我们的程序非常小,但占据的CPU资源却非常多。
这是因为在发布器的while循环里没有执行必要的sleep操作,使得发布器一直以最高速率运行,长时间占用CPU。
本篇文章分为以下两部分:
sleep调用使发布器的频率稳定在1Hzsleep事实上,我们所需要做的只有两行工作,首先创建一个ros::Rate对象,然后在while循环里调用该对象的.sleep()函数即可。
修改后完整的代码如下:
#include <ros/ros.h>
#include <std_msgs/Float64.h>
int main(int argc, char **argv) {
ros::init(argc, argv, "minimal_publisher"); // 初始化节点名
ros::NodeHandle n; //
// ++++
ros::Rate s_timer(1.0); // 参数1.0代表发布频率即1.0Hz
// ++++
ros::Publisher my_publisher_object = n.advertise<std_msgs::Float64>("topic1", 1); // 创建一个发布器,调用advertise通知ROS Master话题名称以及话题类型
//"topic1" 是话题名
// 参数 "1" 是queue_size,表示缓冲区大小
std_msgs::Float64 input_float; // 创建一个发布器将要使用的消息变量
// 该消息定义在: /opt/ros/indigo/share/std_msgs
// 在ROS中发布的消息都应该提前定义,以便订阅者接收到消息后该如何解读
// Float64消息的定义如下,其中包含一个数据字段data:
// float64 data
input_float.data = 0.0; // 设置数据字段
// 程序所要做的工作将在下面的循环里完成
while (ros::ok())
{
// 该循环没有sleep,因此将一直处于运行状态,不断消耗CPU资源
input_float.data = input_float.data + 0.001; //每循环一次+0.01
my_publisher_object.publish(input_float); // 发布消息到对应的话题
// ++++
s_timer.sleep(); // 在这里调用sleep函数可以让程序在这里
// 停止一段时间以便达到要求的发布频率
// ++++
}
}将修改后的发布器重新进行编译,然后按照和上篇文章一样依次运行:
roscore再打开一个终端,运行
rosrun my_minimal_node my_minimal_publisher # 启动发布器检查发布频率,运行
rostopic hz /topic1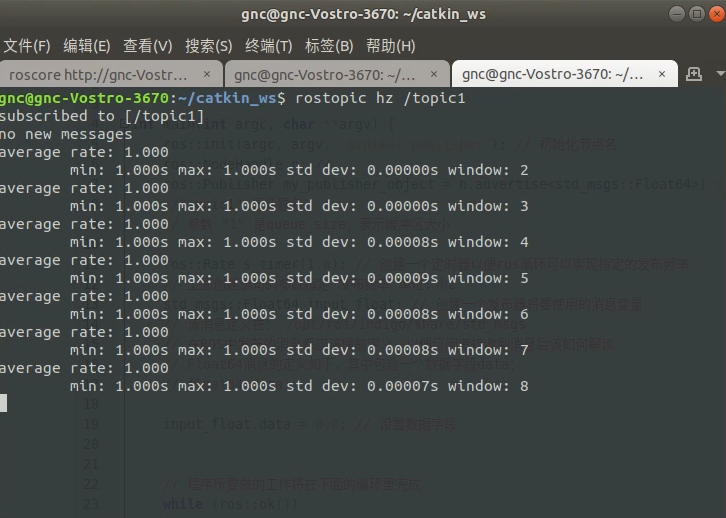
可以看到此时发布器的发布频率已经基本稳定在1Hz了。然后检查系统监视器的状态:
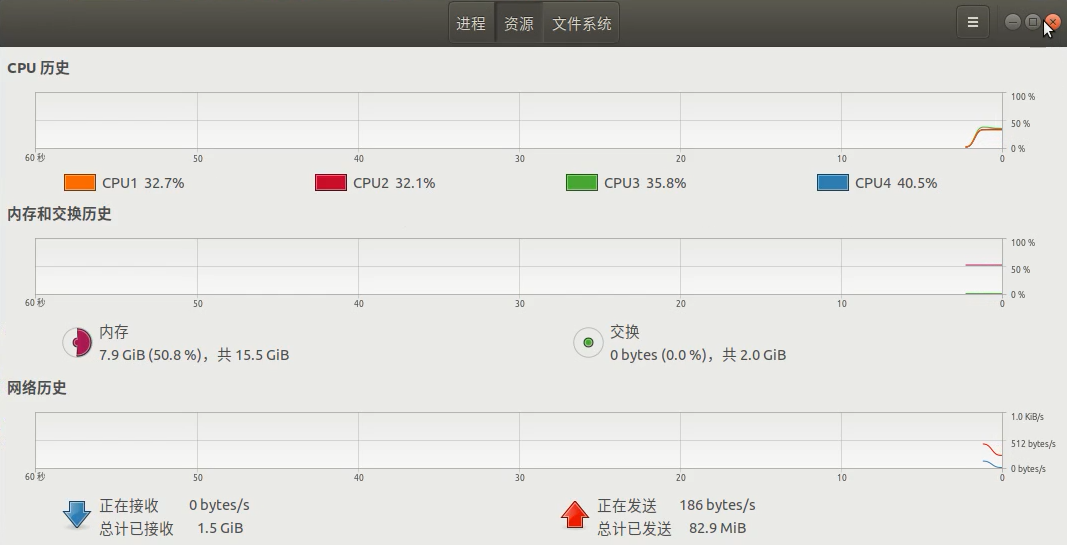
也同样可以看到此时CPU的占用率已经降下来了。
首先将我们提前修改好的订阅器代码复制到src目录下,代码如下:
#include<ros/ros.h>
#include<std_msgs/Float64.h>
void myCallback(const std_msgs::Float64& message_holder)
{
// 打印出我们接收到的值
ROS_INFO("received value is: %f",message_holder.data);
}
int main(int argc, char **argv)
{
ros::init(argc,argv,"minimal_subscriber"); //初始化节点
// 节点名定义为 minimal_subscriber
ros::NodeHandle n; // 节点句柄,用来创建订阅器
// 订阅话题'topic1'
// subscribe中的mycallback是回调函数,每当有新数据到来时,该函数
// 便会被调用
// 实际的工作是在回调函数中完成的
ros::Subscriber my_subscriber_object=
n.subscribe("topic1",1,myCallback);
ros::spin(); // 类似于 `while(1)`语句,但是当有新消息到来时,会调用回调函数
return 0;
} 然后和上篇文章一样,为了编译我们刚写的订阅器,我们还需要修改CMakeLists.txt文件,以便让编译器知道应该编译我们新增的文件。类比上篇文章的发布器,我们在CMakeLists.txt文件中加入如下两行:
add_executable(my_minimal_subscriber src/minimal_subscriber .cpp) # 第一个参数是生成后的可执行文件名 第二个参数
# 是源文件路径名
target_link_libraries(my_minimal_subscriber ${catkin_LIBRARIES}) # 链接库打开终端,导航到工作区目录下~/catkin_ws,然后执行命令
catkin_make等待编译完成后,依次执行命令(这些命令都是在不同的终端下输入)
roscore
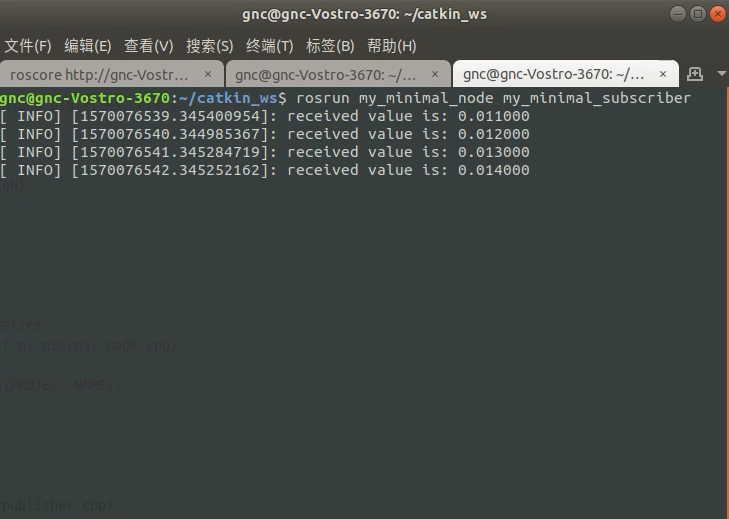
rosrun my_minimal_node my_minimal_publisher
rosrun my_minimal_node my_minimal_subscriber然后在订阅器的终端下就可以看出输出
运行命令rosnode list检查节点

最后,可以运行命令
rqt_graph来显示一个图形化的节点-话题连接图:
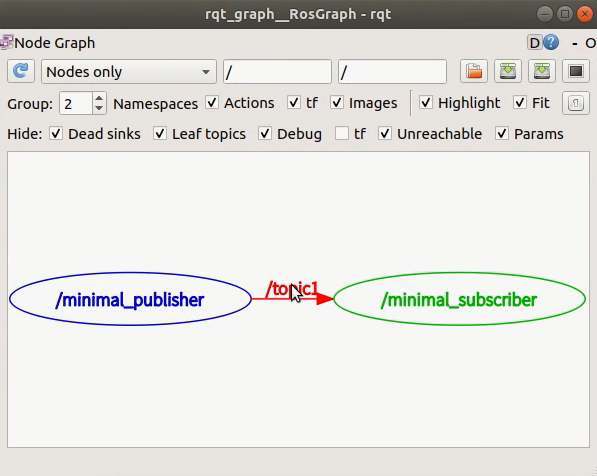
由上面的直观展示可以看出,消息由发布器流出到话题topic1然后再流向订阅器。
以上所有过程我录制了一个视频,在浏览文章过程中如果遇到问题,您可以查看视频来看看我是怎么做的。
标签:对象 hand 执行命令 get 包含 share 部分 target 文件名
原文地址:https://www.cnblogs.com/cporoske/p/11621423.html