标签:问题 模型 inf com image 矩阵 视图 bsp undle
(一)建立问题模型
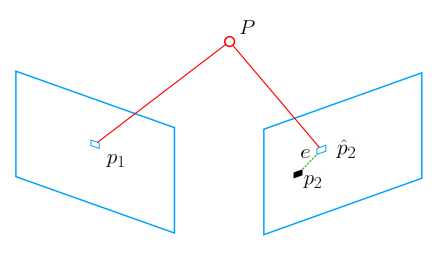
以第一帧的相机坐标系为世界坐标系,世界坐标系中存在n个空间点P,其在第二帧的投影点为p,现在希望求出相机的位姿R,t
a
双视图下Bundle Adjustment重投影误差的雅可比矩阵
原文地址:https://www.cnblogs.com/npulzb/p/11643498.html