标签:决定 class d3d 背景 重要 元素 weixin 不为 detail
细化技术:把一个平面区域简化成图的结构形状表示法
骨架:一种细化结构,它是目标的重要拓扑描述,具有非常广泛的应用。在图像识别或数据压缩时,经常用细化结构。
例如:在识别字符之前,往往要先对字符作细化处理,求出字符的细化结构。
细化的作用:目的将图像的骨架提取出来的同时,保持图像细小部分的连通性,对被处理的图像进行细化有助于突出形状特点和减少冗余信息量。
细化算法:采取逐次去除边界的方法进行的,不能破化图像的连通性。
通常选择一组结构元素对,不断在这些结构对中循环,如果所得结果不再变化,则终止迭代过程,随着迭代的进行,集合也不断细化。
结构对的选择:仅受结构元素不相交的限制(不同的结构对),事实上,我们可以使用同一个结构对,即在不断重复的迭代细化过程使用同一个结构对。
细化满足的条件:
1.在细化的过程中,图像应该有规律地缩小;
2.在图像逐步缩小的过程中,应当使图像的连通性质保持不变。
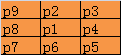
我们对一副二值图像进行骨架提取,就是删除不需要的轮廓点,只保留其骨架点。假设一个像素点,我们定义该点为p1,则它的八邻域点p2->p9位置如下图所示,该算法考虑p1点邻域的实际情况,以便决定是否删除p1点。假设我们处理的为二值图像,背景为黑色,值为0,要细化的前景物体像素值为1。
算法的描述如下。
首先复制源图像到目地图像,然后建立一个临时图像,接着执行下面操作:
1. 把目地图像复制给临时图像,对临时图像进行一次扫描,对于不为0的点,如果满足以下四个条件,则在目地图像中删除该点(就是设置该像素为0),这里p2,…,p9是对应位置的像素灰度值(其为1或者0)。
a. 2<= p2+p3+p4+p5+p6+p7+p8+p9<=6
大于等于2会保证p1点不是端点或孤立点,因为删除端点和孤立点是不合理的,小于等于6保证p1点是一个边界点,而不是一个内部点。等于0时候,周围没有等于1的像素,所以p1为孤立点,等于1的时候,周围只有1个灰度等于1的像素,所以是端点(注:端点是周围有且只能有1个值为1的像素)。

b. p2->p9的排列顺序中,01模式的数量为1,比如下面的图中,有p2p3 => 01, p6p7=>01,所以该像素01模式的数量为2。
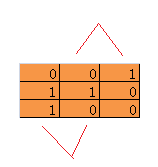
之所以要01模式数量为1,是要保证删除当前像素点后的连通性。比如下面的图中,01模式数量大于1,如果删除当前点p1,则连通性不能保证。

c. P2*p4*p6 = 0
d. p4*p6*p8 = 0
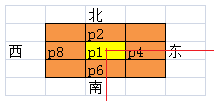
在第一次子迭代中,只是移去东南的边界点,而不考虑西北的边界点,注意p4,p6出现了2次,就是说它们有一个为0,则c,d就满足。
2. 接下来,把目地图像再次复制到临时图像,接着对临时图像进行一次扫描,如果不为0的点它的八邻域满足以下4个条件,则在目地图像中删除该点(就是设置该像素为0)
a. 2<= p2+p3+p4+p5+p6+p7+p8+p9<=6
b. p2->p9的排列顺序中,01模式的数量(这里假设二值图非零值为1)为1。
c. p2*p4*p8 = 0
d. p2*p6*p8 = 0
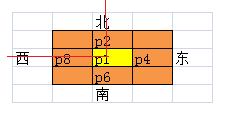
第二次迭代则相反,会移去西北的边界点,注意p2,p8出现了2次,就是说它们有一个为0,则c,d就满足。
执行完上面两个步骤后,就完成了一次细化算法,我们可以多次迭代执行上述过程,得到最终的骨架图。
1.首先对图像进行二值化,白色为255,黑色为0。
2.设置一个3*3的领域S模板。
3.S模板中各个位置上的取值取决于模板所对应图像中不同位置的像素,如果S模板某一个位置上所对应的像素值为白,模板上该位置赋为0,否则赋为1。
4.循环所有的前景像素点,对符合如下条件的像素点标记为删除:
5.循环所有的前景像素点,对符合如下条件的像素点标记为删除:
6.如果没有满足的点,则结束细化过程。
下面:
Image_Use为目标图像:高120,长180,处理时不考虑边界(四边)
//背景为黑色,值为0,要细化的前景物体像素值为1。 int temp[3][3]; int count = 0,flinsh_flag = 0; while(1){ flinsh_flag = 0; for(int i = 1;i<120-1;i++) { for(int j = 1;j<180-1;j++) { if(Image_Use[i][j] == 255) continue; //第一步初始化模板 memset(temp, 0, sizeof(temp)); count = 0; //第二步根据模板所对应的像素点,对模板进行赋值 //如果S模板某一个位置上所对应的像素值为白,模板上该位置赋为0,否则赋为1 if(Image_Use[i][j-1] == 0) temp[1][0] = 1; if(Image_Use[i][j+1] == 0) temp[1][2] = 1; if(Image_Use[i-1][j-1] == 0) temp[0][0] = 1; if(Image_Use[i-1][j+1] == 0) temp[0][2] = 1; if(Image_Use[i-1][j] == 0) temp[0][1] = 1; if(Image_Use[i+1][j-1] == 0) temp[2][0] = 1; if(Image_Use[i+1][j+1] == 0) temp[2][2] = 1; if(Image_Use[i+1][j] == 0) temp[2][1] = 1; // for(int x = 0;x<3;x++) for(int y = 0;y<3;y++) { if(x == 1 && y == 1) continue; if(temp[x][y] == 1) count ++; } if(count>=2&&count<=6) { int ap = 0; if (temp[0][1] == 0 && temp[0][2] == 1) ++ap; if (temp[0][2] == 0 && temp[1][2] == 1) ++ap; if (temp[1][2] == 0 && temp[2][2] == 1) ++ap; if (temp[2][2] == 0 && temp[2][1] == 1) ++ap; if (temp[2][1] == 0 && temp[2][0] == 1) ++ap; if (temp[2][0] == 0 && temp[1][0] == 1) ++ap; if (temp[1][0] == 0 && temp[0][0] == 1) ++ap; if (temp[0][0] == 0 && temp[0][1] == 1) ++ap; if(ap == 1&&((temp[0][1]*temp[1][2]*temp[2][1])== 0)&&((temp[1][2]*temp[2][1]*temp[1][0])== 0)) { Image_Use[i][j] = 255; flinsh_flag ++; } } } } if(flinsh_flag == 0) { break; } flinsh_flag = 0; for(int i = 1;i<120-1;i++) { for(int j = 1;j<180-1;j++) { if(Image_Use[i][j] == 255) continue; //第一步初始化模板 memset(temp, 0, sizeof(temp)); count = 0; //第二步根据模板所对应的像素点,对模板进行赋值 //如果S模板某一个位置上所对应的像素值为白,模板上该位置赋为0,否则赋为1 if(Image_Use[i][j-1] == 0) temp[1][0] = 1; if(Image_Use[i][j+1] == 0) temp[1][2] = 1; if(Image_Use[i-1][j-1] == 0) temp[0][0] = 1; if(Image_Use[i-1][j+1] == 0) temp[0][2] = 1; if(Image_Use[i-1][j] == 0) temp[0][1] = 1; if(Image_Use[i+1][j-1] == 0) temp[2][0] = 1; if(Image_Use[i+1][j+1] == 0) temp[2][2] = 1; if(Image_Use[i+1][j] == 0) temp[2][1] = 1; // for(int x = 0;x<3;x++) for(int y = 0;y<3;y++) { if(x == 1 && y == 1) continue; if(temp[x][y] == 1) count ++; } if(count>=2&&count<=6) { int ap = 0; if (temp[0][1] == 0 && temp[0][2] == 1) ++ap; if (temp[0][2] == 0 && temp[1][2] == 1) ++ap; if (temp[1][2] == 0 && temp[2][2] == 1) ++ap; if (temp[2][2] == 0 && temp[2][1] == 1) ++ap; if (temp[2][1] == 0 && temp[2][0] == 1) ++ap; if (temp[2][0] == 0 && temp[1][0] == 1) ++ap; if (temp[1][0] == 0 && temp[0][0] == 1) ++ap; if (temp[0][0] == 0 && temp[0][1] == 1) ++ap; if(ap == 1&&((temp[0][1]*temp[1][2]*temp[1][0])== 0)&&((temp[0][1]*temp[2][1]*temp[1][0]) == 0)) { Image_Use[i][j] = 255; flinsh_flag++; } } } } if(flinsh_flag == 0) { break; } }
refer:
标签:决定 class d3d 背景 重要 元素 weixin 不为 detail
原文地址:https://www.cnblogs.com/-wenli/p/11743999.html