标签:style blog http io color os ar sp strong
本文的主题实际上是图像的颜色空间的转换,借助一个颜色选取程序来说明OpenCV中颜色转换函数的用法以及一些注意事项。
RGB颜色空间:RGB采用加法混色法,因为它是描述各种“光”通过何种比例来产生颜色。光线从暗黑开始不断叠加 产生颜色。RGB描述的是红绿蓝三色光的数值。数字图像存储方面一般都是用RGB模式,值得注意的是OpenCV里三通道的存储顺序是BGR。
HSV,HSI:这两个颜色格式都是根据人眼对颜色的区分来定义的格式,其中H(hue)表示色相,S(saturation)表示饱和度,V(value)表示明度,I(intensity)代表了亮度。
Lab空间:模型中均匀改变对应于在感知颜色中的均匀改变,所以我们可以把Lab想像为颜色空间中的一个点,相邻的点靠的越近说明两者的颜色越接近,所以Lab空间常用来度量两个颜色的相似性。
更多颜色空间的知识可以参考:http://en.wikipedia.org/wiki/Color_space
二、OpenCV中的颜色空间转换
OpenCV里通过cvtColor函数来完成图片的颜色转换,cvtColor是在opencv2/imgproc/imgproc.hpp头文件中定义的,它的C++接口如下:
1 void cvtColor(InputArray src, OutputArray dst, int code, int dstCn=0 )
src:输入图像。
dst:输出图像。
code:颜色转换类型,比如:CV_BGR2Lab,CV_BGR2HSV,CV_HSV2BGR,CV_BGR2RGB。
dstCn:输出图像的通道号,如果默认为0,则表示按输入图像的通道数。
把image图像由BGR转换为Lab:cvtColor(image,image,CV_BGR2Lab)
三、简单的魔术棒程序
首先我们定义一个colorDetect类:
1 class colorDetect{ 2 private: 3 int minDist; //minium acceptable distance 4 Vec3b target;//target color; 5 Mat result; //the result 6 public: 7 colorDetect(); 8 void SetMinDistance(int dist); 9 void SetTargetColor(uchar red,uchar green,uchar blue); 10 void SetTargetColor(Vec3b color); //set the target color 11 Mat process(const Mat& image); //main process 12 };
其中的minDist是我们定义的阈值用于限定两种颜色之间的距离,相当于PhotoShop中魔术棒工具的阈值。
target是目标颜色,相当于种子颜色。result是存储处理得到的结果。
process是主要的处理程序,下面我们来看process的内容。
1 Mat colorDetect::process(const Mat& image) 2 { 3 Mat ImageLab=image.clone(); 4 result.create(image.rows,image.cols,CV_8U); 5 //将image转换为Lab格式存储在ImageLab中 6 cvtColor(image,ImageLab,CV_BGR2Lab); 7 //将目标颜色由BGR转换为Lab 8 Mat temp(1,1,CV_8UC3); 9 temp.at<Vec3b>(0,0)=target;//创建了一张1*1的临时图像并??目标颜色填充 10 cvtColor(temp,temp,CV_BGR2Lab); 11 target=temp.at<Vec3b>(0,0);//再从临时图像的Lab格式中取出目标颜色 12 // 创建处理用的迭代器 13 Mat_<Vec3b>::iterator it=ImageLab.begin<Vec3b>(); 14 Mat_<Vec3b>::iterator itend=ImageLab.end<Vec3b>(); 15 Mat_<uchar>::iterator itout=result.begin<uchar>(); 16 while(it!=itend) 17 { 18 //两个颜色值之间距离的计算 19 int dist=static_cast<int>(norm<int,3>(Vec3i((*it)[0]-target[0], 20 (*it)[1]-target[1],(*it)[2]-target[2]))); 21 if(dist<minDist) 22 (*itout)=255; 23 else 24 (*itout)=0; 25 it++; 26 itout++; 27 } 28 return result; 29 }
程序中有2点需要特别注意:
1,在将图像转换为Lab空间后,目标颜色也需要进行转换,做法是创建了一个临时图像。
2,判断两个颜色之间的距离运算了norm函数,它的运算是norm<typename,dim>(v)。其中v是一个dim维的向量。程序中是一个三维的适量,是两个颜色值两减后的结果。
那值得思考的是能不能把Vec3i((*it)[0]-target[0],(*it)[1]-target[1],(*it)[2]-target[2])替换为Vec3i((*it)-target)呢?答案是否的,因为(*it)-target在实际运算过程中会自动的把相减的结果进行类型限制。
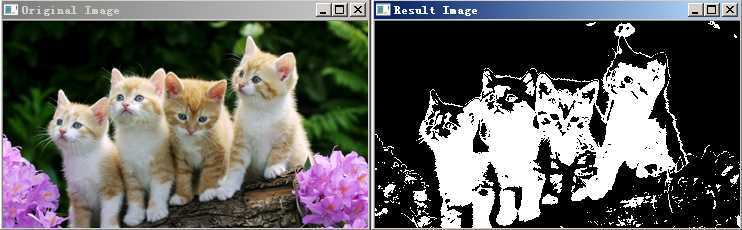
我们对目标颜色和阈值进行这样的设置后可以得到一个示例的效果:
1 cdet.SetTargetColor(150,150,150); 2 cdet.SetMinDistance(50);
标签:style blog http io color os ar sp strong
原文地址:http://www.cnblogs.com/shiddong/p/4058591.html