标签:它的 不难 div 树的高度 strong 树的定义 慢慢 理想 自底向上
RB-Tree,即红黑树,它的定义如下:
单看上面的定义,大家肯定跟我一样一头雾水,别急,下面我们从最简单的二叉查找树说起,慢慢撕开这个高级数据结构的神秘面纱。
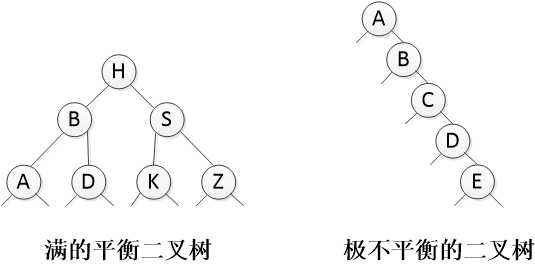
一棵二叉查找树,每个节点的左节点均比当前节点小,且右节点均比当前节点大。上图的两棵树,均属于二叉查找树。于是,查找的过程如下:
最好的情况下,上图左侧示例,当所有节点的左右子树的高度都相同时,无论查找值是什么,每遍历一个节点都能排除一半的可能,这种情况的时间复杂度是O(logN)
最坏的情况下,上图右侧示例,当所有节点都集中在一条路径上,此时二叉查找树已经退化为一个链表,时间复杂度增大到O(N)
随着不断的增删操作,二叉查找树的时间复杂度变得不可控,介于O(logN)和O(N)之间。
有没有可能一直控制在最好的情况下呢,请看下一节:平衡二叉查找树
上一节讲到二叉查找树在最坏情况下会退化为链表,如果能保证每个节点的左右子树都是平衡的,即任意节点的左右子树的高度差均不大于1,那么查找的时间复杂度可以稳定在O(logN)。这就是平衡二叉查找树。
平衡二叉查找树的时间复杂度稳定在O(logN)。
但它同时给插入和删除操作带来了麻烦,每次插入或删除后,我们均需要确认这次操作是否影响了整棵树的平衡性,并在全局范围内作出适当调整。这种全局性对编码要求很高,难以实现且不说,额外的维持平衡的逻辑也大大增加了每次插入或删除的消耗,时间复杂度并不比普通二叉查找树优秀。
所以接下来大家不难想到,能否设计一种数据结构能够把全局的平衡性调整简化为局部的调整,从而简化代码实现难度,进而也降低时间复杂度?我们继续看下一节:2-3树
2-3树是由2节点或3节点组成的树结构。这里的2或3指的是每个节点的子树数量:
一棵完整的2-3树,高度平衡,即任意节点到达其任意叶子节点的路径长度均相同,也即任意叶子节点的深度是相同的。所以一棵完整的2-3树,就是一棵满的2叉和3叉树,复杂度:
完整的2-3树的查找时间复杂度:O(logN)
接下来我们以插入操作为例,来看看2-3树是怎么把平衡二叉树要求的全局平衡性调整简化为局部的调整:

对单个节点的插入处理(如上图)
注意:第1步只可能发生在整棵树为空时。
插入操作在一棵树内的处理(如上图)
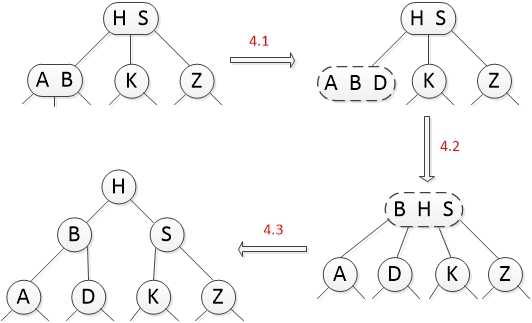
4.将D节点插入一棵现有的树时,会触发自底向上的递归式调整:
4.1 得到一个临时4节点node1(A B D)
4.2 node1裂变,由于父节点(H S)已存在,所以中间key插入到父节点,又得到一个临时节点node2(B H S)
4.3 node2裂变,由于Node2就是根节点,所以整棵树的高度+1,新的根节点是node2的中间key(H)
上面的1/2/3/4这4个步骤,即是对一棵2-3树的插入操作可能涉及的情况,不难发现,对2-3树的插入可以是一个递归过程,每次只处理单个节点即局部的逻辑,整棵树是自平衡的。递归逻辑如下:
2-3树的删除操作在此省略。
现在我们知道2-3树在平衡二叉树的基础上进行了优化,保持平衡即查找复杂度O(logN)的同时能够将每次的调整都控制在局部范围内。但2-3树的实现需要处理两种类型的节点,即2节点和3节点,这就增加了代码实现的复杂度,同时这个复杂的代码引起的消耗也不小,所以2-3树的插入或删除时的时间复杂度还不够理想。
所以接下来就是重头戏了,能否用一种节点来实现2-3树,即用二叉树来实现2-3树,将查找、插入、删除、修改的时间复杂度都控制在一个合理的O(logN)?
上一节的2-3树,其中的3节点如果我们用一个红黑的链接来表示,那么一棵2-3树可以转换成这样:
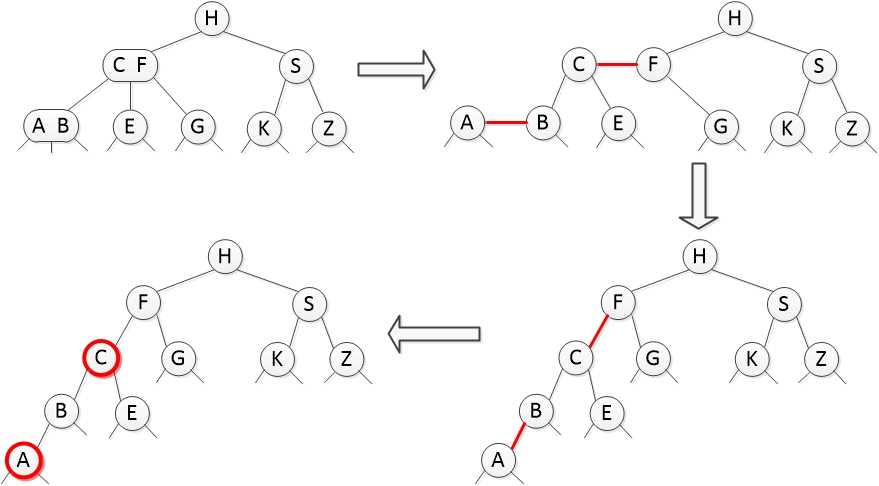
上图中我们对一棵2-3树作了处理,2节点固定为黑色,而3节点可以分解为2个用红色链接连接的2节点,然后将红色链接指向的孩子节点标记为红色,其他节点默认为黑色。事实上这样处理之后,我们就得到了一个红黑树。(注意,上图我们按左倾的方式拆分3节点,同样也可以右倾,即小key作为父节点,大key作为孩子节点)
红黑树既是二叉搜索树,又是特殊的2-3树,现在我们再以2-3树的性质来分析红黑树的定义,就容易理解了:
第1条略过。
第3条是为了后续代码实现的便利性而设定的要求
第2/4条,其实是因为根据上面的转换方式,一个3节点分解成一个黑色的父节点和一个红色的孩子节点,那么红色节点一定会存在一个黑色的父节点。于是根节点没有父节点所以只能是黑色;红色节点的父节点一定是黑色的所以不可能存在相邻的红色节点。
第5条也好理解,正是将红色节点去除,即复原3节点后,能够得到一棵完整的2-3树,树的每个节点的左右子树的高度相等。
红黑树以二叉树的结构实现了一棵特殊的2-3树,由于拆分了3节点,所以树高增加了,那么查找的时间复杂度还有保证吗?
所以红黑树的查找时间复杂度稳定在O(logN)。
红黑树一:从二叉树、2-3树到红黑树,一步步讲解红黑树的来源
标签:它的 不难 div 树的高度 strong 树的定义 慢慢 理想 自底向上
原文地址:https://www.cnblogs.com/JoZSM/p/11784163.html