标签:font col pix color AAT 单位 http 正交 坐标系
相机成像由 世界坐标系(一般是真实存在物体的中心为原点)
到相机坐标系(以光轴为z轴)
到成像坐标系(2D平面,由相机坐标系透视变换所得)
到像素坐标系(2D)
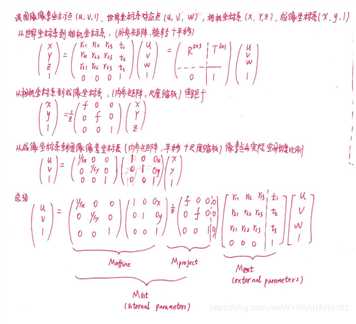
由三维世界坐标系转换到相机坐标系称之为刚体变换

是一个平移加旋转的过程,因此变换矩阵为正交矩阵,即AAT = I, 使用的旋转和平移系数属于相机外参
由相机坐标系到成像坐标系是一个三角形投影的过程
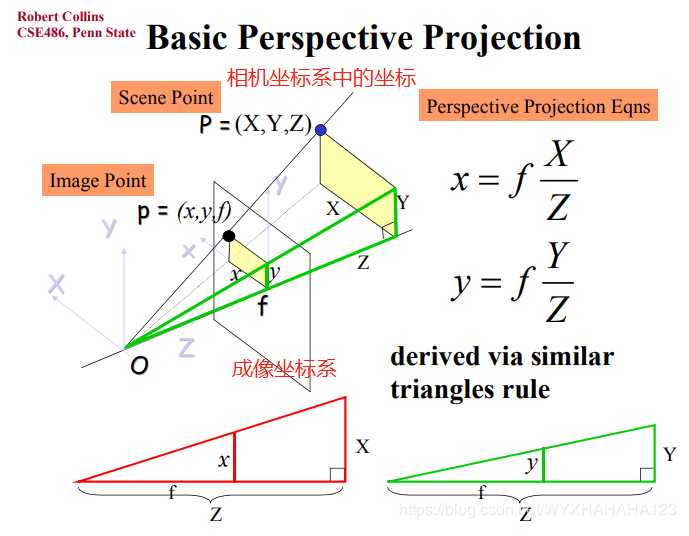
从3D相机坐标系转换到2D成像坐标系。需要用到相机内参

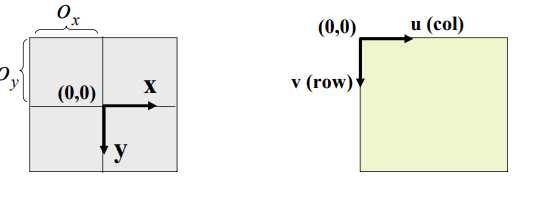
最后一步是成像坐标系转换到像素坐标系,也就是我们做图像处理的像素坐标,通常原点O会从图像中心转换到top left, 并且单位从mm转换为pixel
找到网友写的非常好的图,记录下来:
接下来要求相机的内参和外参需要用到张正友的相机标定,请听下回分解~
标签:font col pix color AAT 单位 http 正交 坐标系
原文地址:https://www.cnblogs.com/ChrisInsistPy/p/11794866.html