标签:ext csharp span upload sha style nbsp 启动 apt
ros学习第五讲:机器人感知
1.首先,你要有一个摄像头,最好功能简单易学的,容易上手。
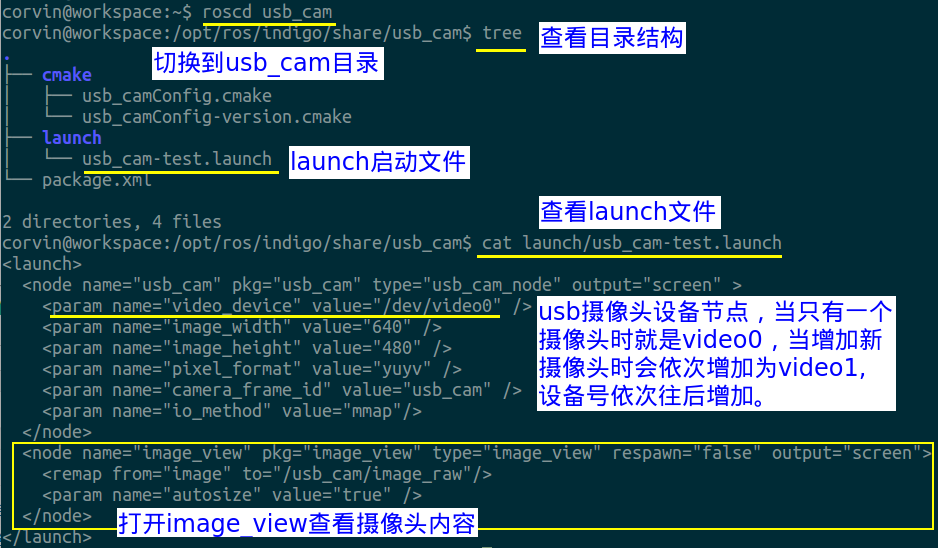
2.安装usb_cam启动摄像头。
sudo apt-get install ros-kinetic-usb-cam
转自:https://www.corvin.cn/535.html
标签:ext csharp span upload sha style nbsp 启动 apt
原文地址:https://www.cnblogs.com/AIboy/p/11801160.html