标签:info 依赖 readlines blob 建模 change __name__ mat set
Reconstruct sparse/dense model from known camera poses
参考官方Faq链接:https://colmap.github.io/faq.html#reconstruct-sparse-dense-model-from-known-camera-poses
在目录下手动新建cameras.txt, images.txt, 和 points3D.txt三个文本文件,目录示例:
+── %ProjectPath%/created/sparse
│ +── cameras.txt
│ +── images.txt
│ +── points3D.txt将内参(camera intrinsics) 放入cameras.txt, 外参(camera extrinsics)放入 images.txt , points3D.txt 为空。具体格式如下:
cameras.txt 示例:
# Camera list with one line of data per camera:
# CAMERA_ID, MODEL, WIDTH, HEIGHT, PARAMS[fx,fy,cx,cy]
# Number of cameras: 2
1 PINHOLE 1280 720 771.904 771.896 639.993 360.001
2 PINHOLE 1280 720 771.899 771.898 639.999 360.001COLMAP 设定了 SIMPLE_PINHOLE ,PINHOLE , SIMPLE_RADIAL ,RADIAL, OPENCV , FULL_OPENCV, SIMPLE_RADIAL_FISHEYE ,RADIAL_FISHEYE,OPENCV_FISHEYE,FOV,THIN_PRISM_FISHEYE 共11种相机模型,其中最常用的为PINHOLE,即小孔相机模型。一般正常拍摄的照片,不考虑畸变即为该模型。手动参数的情况下官方推荐OPENCV相机模型,相比PINHOLE,考虑了xy轴畸变。各模型区别具体可参考Camera Models 查看。请根据自己的已有相机参数选用合适的相机模型。
images.txt 示例:
# Image list with two lines of data per image:
# IMAGE_ID, QW, QX, QY, QZ, TX, TY, TZ, CAMERA_ID, NAME
# POINTS2D[] as (X, Y, POINT3D_ID)
# Number of images: 2, mean observations per image: 2
1 0.430115 0.411564 0.555504 -0.580543 10468.491287 380.313066 1720.465175 1 image001.jpg
# Make sure every other line is left empty
2 0.309712 0.337960 0.655221 -0.600456 10477.663284 446.4208 -1633.886712 2 image002.jpg
3 0.375916 0.401654 0.609703 -0.570633 10592.122754 263.672534 600.636247 3 image003.jpg
COLMAP 中多张图片可以使用一个相机模型,见 IMAGE_ID 所对应的CAMERA_ID, images.txt 中,每张图片由一行图像外参,一行2D点组成。在手动构建中由于没有2D点,第二行留空。QW, QX, QY, QZ 为四元数表示的相机旋转信息,TX, TY, TZ为平移向量。
接下来的命令会依赖目录机构,因此需先明确各级目录,本文中的命令参考以下目录结构:
E:\CODE\COLMAPMANUAL\ProjectPath
├─created
│ └─sparse
│ +── cameras.txt
│ +── images.txt
│ +── points3D.txt
├─dense
├─images
│ +── images001.jpg
│ +── images002.jpg
│ +── ...
└─triangulated
└─sparseimages/ 文件夹下放置需进行重建的图片,created/sparse/ 文件夹下放入上一步创建的 cameras.txt, images.txt 和 points3D.txt 。
注意: 也可以不执行稀疏重建,直接执行MVS步骤生成深度图,可直接跳至 3.2?手动稠密重建 。
在 ProjectPath 目录下运行命令:
colmap feature_extractor --database_path database.db --image_path images目录下会自动生成一个 database.db 文件。终端输出示例:
==============================================================================
Feature extraction
==============================================================================
Processed file [1/25]
Name: image001.jpg
Dimensions: 1280 x 720
Camera: #1 - SIMPLE_RADIAL
Focal Length: 1536.00px
Features: 10300
Processed file [2/25]
...
...
Elapsed time: 0.039 [minutes]可以看出此时使用的相机模型是SIMPLE_RADIAL,这是没有关系的,因为此时只是抽取特征,官方文档的说法是此步之后才需要将 cameras.txt 中的相机内参复制到 database.db 中。
有两种导入方式:
File->New Project->Database->Open 打开我们刚刚建立的 database.db ,Images->Select 选择存放图片的目录。点击 Save 保存。选择 Processing->Database management ,点击 Cameras 查看相机模型。这里就需要一行一行选中已有的相机模型进行修改。选中后点击 Set model ,先选中相机的model类型,如 PINHOLE ,或 OPENCV,注意不同相机的 params 个数可能不一样: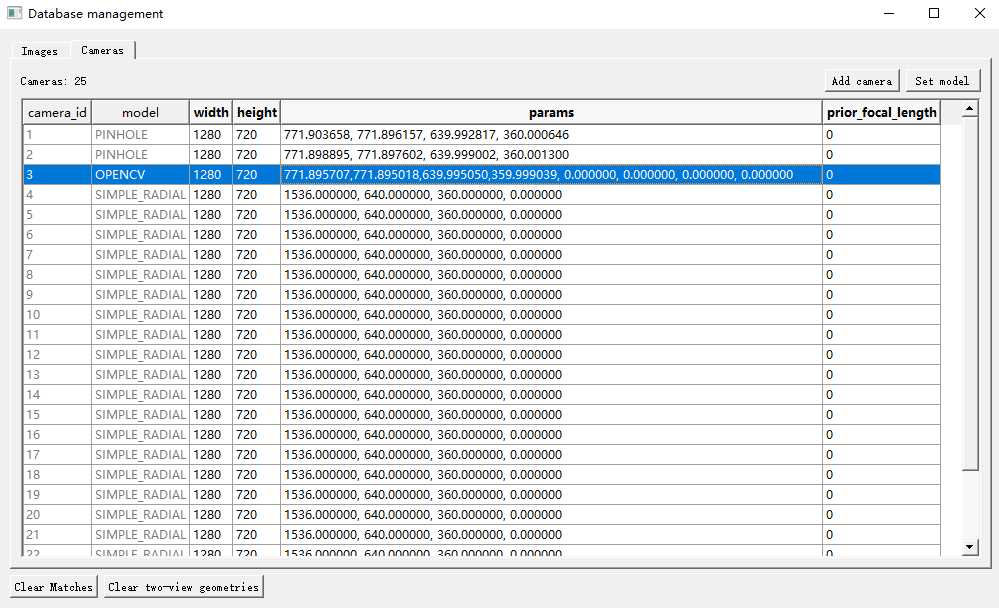
使用Python脚本更改 database.db ,官方在colmap源码 scripts\python\database.py 提供了一个fake的创建database脚本。但我们的目的其实是 update 原来的相机模型,这里我写了一个python脚本,其读取cameras.txt 中的数据,更新当前目录下的 database.db 中的相机模型 。代码如下:
# This script is based on an original implementation by True Price.
# Created by liminghao
import sys
import numpy as np
import sqlite3
IS_PYTHON3 = sys.version_info[0] >= 3
def array_to_blob(array):
if IS_PYTHON3:
return array.tostring()
else:
return np.getbuffer(array)
def blob_to_array(blob, dtype, shape=(-1,)):
if IS_PYTHON3:
return np.fromstring(blob, dtype=dtype).reshape(*shape)
else:
return np.frombuffer(blob, dtype=dtype).reshape(*shape)
class COLMAPDatabase(sqlite3.Connection):
@staticmethod
def connect(database_path):
return sqlite3.connect(database_path, factory=COLMAPDatabase)
def __init__(self, *args, **kwargs):
super(COLMAPDatabase, self).__init__(*args, **kwargs)
self.create_tables = lambda: self.executescript(CREATE_ALL)
self.create_cameras_table = lambda: self.executescript(CREATE_CAMERAS_TABLE)
self.create_descriptors_table = lambda: self.executescript(CREATE_DESCRIPTORS_TABLE)
self.create_images_table = lambda: self.executescript(CREATE_IMAGES_TABLE)
self.create_two_view_geometries_table = lambda: self.executescript(CREATE_TWO_VIEW_GEOMETRIES_TABLE)
self.create_keypoints_table = lambda: self.executescript(CREATE_KEYPOINTS_TABLE)
self.create_matches_table = lambda: self.executescript(CREATE_MATCHES_TABLE)
self.create_name_index = lambda: self.executescript(CREATE_NAME_INDEX)
def update_camera(self, model, width, height, params, camera_id):
params = np.asarray(params, np.float64)
cursor = self.execute(
"UPDATE cameras SET model=?, width=?, height=?, params=?, prior_focal_length=True WHERE camera_id=?",
(model, width, height, array_to_blob(params),camera_id))
return cursor.lastrowid
def camTodatabase(txtfile):
import os
import argparse
camModelDict = {'SIMPLE_PINHOLE': 0,
'PINHOLE': 1,
'SIMPLE_RADIAL': 2,
'RADIAL': 3,
'OPENCV': 4,
'FULL_OPENCV': 5,
'SIMPLE_RADIAL_FISHEYE': 6,
'RADIAL_FISHEYE': 7,
'OPENCV_FISHEYE': 8,
'FOV': 9,
'THIN_PRISM_FISHEYE': 10}
parser = argparse.ArgumentParser()
parser.add_argument("--database_path", default="database.db")
args = parser.parse_args()
if os.path.exists(args.database_path)==False:
print("ERROR: database path dosen't exist -- please check database.db.")
return
# Open the database.
db = COLMAPDatabase.connect(args.database_path)
idList=list()
modelList=list()
widthList=list()
heightList=list()
paramsList=list()
# Update real cameras from .txt
with open(txtfile, "r") as cam:
lines = cam.readlines()
for i in range(0,len(lines),1):
if lines[i][0]!='#':
strLists = lines[i].split()
cameraId=int(strLists[0])
cameraModel=camModelDict[strLists[1]] #SelectCameraModel
width=int(strLists[2])
height=int(strLists[3])
paramstr=np.array(strLists[4:12])
params = paramstr.astype(np.float64)
idList.append(cameraId)
modelList.append(cameraModel)
widthList.append(width)
heightList.append(height)
paramsList.append(params)
camera_id = db.update_camera(cameraModel, width, height, params, cameraId)
# Commit the data to the file.
db.commit()
# Read and check cameras.
rows = db.execute("SELECT * FROM cameras")
for i in range(0,len(idList),1):
camera_id, model, width, height, params, prior = next(rows)
params = blob_to_array(params, np.float64)
assert camera_id == idList[i]
assert model == modelList[i] and width == widthList[i] and height == heightList[i]
assert np.allclose(params, paramsList[i])
# Close database.db.
db.close()
if __name__ == "__main__":
camTodatabase("created/sparse/cameras.txt")
注意,在 update_camera 函数中我将 prior_focal_length 设为 True,在数据库中值为1,表示信任预先给定的焦距,如有其他需求,可查看官方文档修改。
在 ProjectPath 目录下运行命令:
colmap exhaustive_matcher --database_path database.db终端输出示例:
==============================================================================
Exhaustive feature matching
==============================================================================
Matching block [1/1, 1/1] in 13.361s
Elapsed time: 0.225 [minutes]在 ProjectPath 目录下运行命令:
colmap point_triangulator --database_path database.db --image_path images --input_path created/sparse --output_path triangulated/sparse终端输出示例:
==============================================================================
Loading database
==============================================================================
Loading cameras... 25 in 0.000s
Loading matches... 282 in 0.005s
Loading images... 25 in 0.011s (connected 25)
Building correspondence graph... in 0.048s (ignored 0)
Elapsed time: 0.001 [minutes]
==============================================================================
Triangulating image #1
==============================================================================
=> Image has 0 / 7503 points
=> Triangulated 3807 points
...
...
Bundle adjustment report
------------------------
Residuals : 148710
Parameters : 38385
Iterations : 2
Time : 0.153904 [s]
Initial cost : 0.291198 [px]
Final cost : 0.289322 [px]
Termination : Convergence
=> Merged observations: 7
=> Completed observations: 0
=> Filtered observations: 11
=> Changed observations: 0.000242
==============================================================================
Extracting colors
==============================================================================这里注意每张图片 Triangulated Points 数,如果太少,比如小于500,就说明输入的相机外参有问题,不同视图之间找不到共同可以观察到(Triangulate)的点,重建基本是失败的。关于 Bundle adjustment 是否收敛的问题,如果不收敛,一定失败了,如果收敛了,也不一定成功。我们可以仍通过运行COLMAP 的GUI程序, File->Import model 导入刚刚生成的在 triangulated/sparse 下的.bin格式的稀疏重建模型,观察重建效果。
在 ProjectPath 目录下运行命令:
colmap image_undistorter --image_path images --input_path triangulated/sparse --output_path dense继续运行命令:
colmap patch_match_stereo --workspace_path dense这一步时间较长,与图片数量,分辨率和显卡能力都有关系,25张1280*720的图片在一张GTX 1070显卡上大概需要13分钟。如果需要生成三角网格,继续运行命令:
colmap stereo_fusion --workspace_path dense --output_path dense/fused.ply到此,稠密重建结束。如果想可视化重建的深度图,法线等,可通过运行COLMAP 的GUI程序, Reconstruction->Dense reconstruction 进入稠密重建菜单,点击 Select 选择 dense 文件夹,就可以在应用程序界面选择每张图片对应的深度图和法线图。
稀疏重建(三角剖分)对于稠密重建并不是必须的。在已知相机Pose的情况下可以直接进行稠密重建,首先在 ProjectPath 目录下运行命令:
colmap image_undistorter --image_path images --input_path created/sparse --output_path dense在 dense/sparse/ 目录下的.bin文件的内容与 created/sparse 中我们手动建立的.txt文件内容相同。在 dense/stereo/ 目录下的 patch-match.cfg 规定了源图像进行块匹配的参考图像,默认格式如下:
image001.jpg
__auto__, 20
image002.jpg
__auto__, 20
...
__auto__, 20
image025.jpg
__auto__, 20图像名字下一行规定了稠密重建时对应图像的参考图像, __auto__, 20 表示自动优先级前20张,但该选项只有进行了稀疏重建才可用。在图像数量少的情况下,可以使用 __all__ 指定所有图像为参考图像。或者,可以使用空格分隔得图像名字指定参考图像,示例:
image001.jpg
image002.jpg, image003.jpg, image004.jpg
image002.jpg
image001.jpg, image003.jpg, image004.jpg, image007.jpg之后,我们需要指定最小深度 depth_min 和最大深度 depth_max 来执行mvs,具体数值根据场景来定:
colmap patch_match_stereo --workspace_path dense --PatchMatchStereo.depth_min 0.0 --PatchMatchStereo.depth_max 20.0融合3D网格的命令与上一节一样,依然为:
colmap stereo_fusion --workspace_path dense --output_path dense/fused.ply部分手动得到的相机内外参,以旋转矩阵+平移向量的方式实现,colmap需要转化为四元数,这里提供一部分matlab代码:
%旋转矩阵转四元数
% R为旋转矩阵 Quat为四元数向量
q0=0.5*sqrt(1+R(1,1)+R(2,2)+R(3,3));
q1=(R(3,2)-R(2,3))/(4*q0);
q2=(R(1,3)-R(3,1))/(4*q0);
q3=(R(2,1)-R(1,2))/(4*q0);
Quat=[q0 q1 q2 q3];已有一组相机内参矩阵 K ,相机外参四元数: Quat ,平移向量: T ,写入至 cameras.txt 和 images.txt :
cam_txt=fopen(cam_txt_path,'w');
image_txt=fopen(image_txt_path,'w');
fprintf(cam_txt,'#By liminghao\n#CAMERA_ID, MODEL, WIDTH, HEIGHT, PARAMS[]\n# Number of cameras: %d \n',numofimage);
fprintf(image_txt,'#By liminghao\n#IMAGE_ID, QW, QX, QY, QZ, TX, TY, TZ, CAMERA_ID, NAME\n# Number of images: %d \n',numofimage);
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
for i=1:numofimage
fx=Ktemp{i}(1,1);
fy=Ktemp{i}(2,2);
cx=Ktemp{i}(1,3);
cy=Ktemp{i}(2,3);
fprintf(cam_txt,'%d PINHOLE %d %d %f %f %f %f\n',i,Width,Height,fx,fy,cx,cy);
fprintf(image_txt,'%d ',i);
for qi=1:1:length(Quatvector{i})
fprintf(image_txt,'%f ',Quatvector{i}(qi));
end
for ti=1:1:length(Ttemp{i})
fprintf(image_txt,'%f ',Ttemp{i}(ti));
end
fprintf(image_txt,'%d image%03d.jpg\n\n',i,i);
end
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
fclose(cam_txt);
fclose(image_txt);以上代码逻辑比较简单,用Python等其他语言也较容易实现,这里要注意的就是以上代码中设置相机模型为 PINHOLE ,使用者请根据自己情况再行修改。
标签:info 依赖 readlines blob 建模 change __name__ mat set
原文地址:https://www.cnblogs.com/li-minghao/p/11865794.html