标签:完全 解码 智能 普通人 需要 ever tracking 带来 机器人

卡内基梅隆大学的研究团队与明尼苏达大学合作,在无创机器人设备控制领域取得了突破。研究人员使用一种非侵入性的脑机接口(BCI),开发了有史以来首个成功的,由心理控制的机械臂,该机械臂具有连续跟踪和跟踪计算机光标的能力。
仅凭思想就能够无创地控制机器人设备将具有广泛的应用,特别是有益于瘫痪患者和运动障碍患者的生活。
BCI已被证明仅使用从大脑植入物感应到的信号来控制机器人设备的良好性能。当机器人设备可以进行高精度控制时,它们可以用于完成各种日常任务。但是,到目前为止,那些脑机接口成功地控制机械手臂的研究,都使用了侵入性的大脑植入物。这些植入物需要大量的医学和外科专业知识才能正确安装和操作,更不用说成本和对受试者的潜在风险。因此,它们的应用仅限于少数临床病例。
BCI研究面临的一大挑战是开发侵入性较小甚至完全无侵入的技术,该技术将使瘫痪的患者利用自己的"思想"来控制其环境或机器人肢体。这种无创的BCI技术如果成功,将会给许多患者甚至普通人带来巨大的改变。将会给许多患者甚至普通人带来巨大的改变。
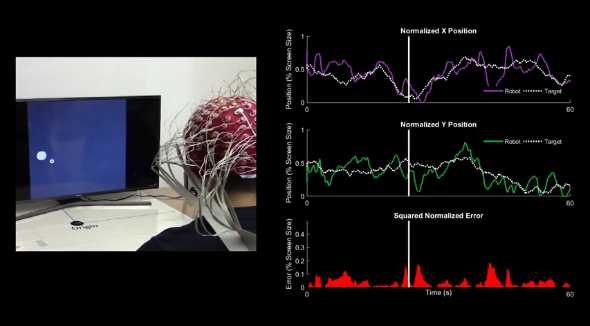
卡内基梅隆大学教授贺斌和他的实验室使用新颖的传感和机器学习技术,能够访问大脑深处的信号,从而实现了对机械臂的高分辨率控制。他采用无创神经成像技术和一种新的连续追踪范式,克服了EEG信号的噪声,显着改善了基于EEG的神经解码能力,并促进了机器人设备实时连续2D控制。
他有史以来第一次使用无创BCI控制在计算机屏幕上跟踪光标的机械臂,他在人类受试者中证明了机械臂现在可以连续跟随光标。以前,由人类无创控制的机械臂曾经跟随移动的光标以不连续的离散动作运动-好像机械臂试图“追赶”大脑的命令-现在,机械臂以平滑,连续的路径跟随光标。
在《科学机器人》杂志上发表的一篇论文中,贺斌教授团队建立了一个新的框架,该框架通过增加用户参与度和培训,以及通过EEG源成像实现无创神经数据的空间分辨率,来解决和改进BCI的"大脑"和"计算机"组件。
论文"Noninvasive neuroimaging enhances continuous neural tracking for robotic device control"的结果表明该团队解决这一问题的独特方法不仅将传统BCI学习提高近60%,还将计算机光标的连续跟踪能力提高了近500%。
通过提供安全,非侵入性的设备"思维控制"功能,该技术还可以帮助人们与人们互动并控制其环境,从而可以为各种人群提供帮助。迄今为止,该技术已经在68位身体健全的受试者中进行了测试(每个受试者最多10个疗程),包括虚拟设备控制和机器人手臂的控制以进行持续追踪。该技术直接适用于患者,该团队计划在不久的将来进行临床试验。
他说:"尽管使用非侵入性信号存在技术存在挑战,但我们完全致力于将这种安全,经济的技术带给可以从中受益的人们。" "这项工作代表了非侵入性脑机接口的重要一步,这一技术有朝一日可能会成为普及性的辅助技术,可以帮助所有人,就像智能手机那样。"
参考
https://techxplore.com/news/2019-06-first-ever-successful-mind-controlled-robotic-arm.html
脑机接口 QQ交流群:903290195
更多分享,请关注公众号
标签:完全 解码 智能 普通人 需要 ever tracking 带来 机器人
原文地址:https://www.cnblogs.com/RoseVorchid/p/11929928.html