标签:向量 简单 sdn include 范围 cto https 变化 线段
地址 http://poj.org/problem?id=2991
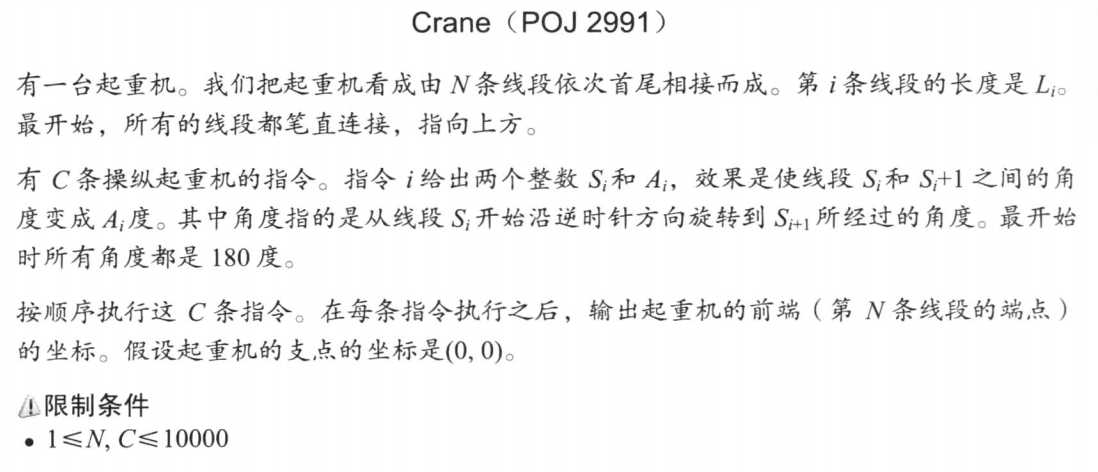

题解
本来以为这是一个简单的线段树模板 不料始终不太明白线段树如何记录转动角度后的各个线段端的XY值
学习了网络上的一些博客题解 感觉似是而非 谈到复数 角度 向量等,有点不太好理解
现在这里将自己的理解记录如下
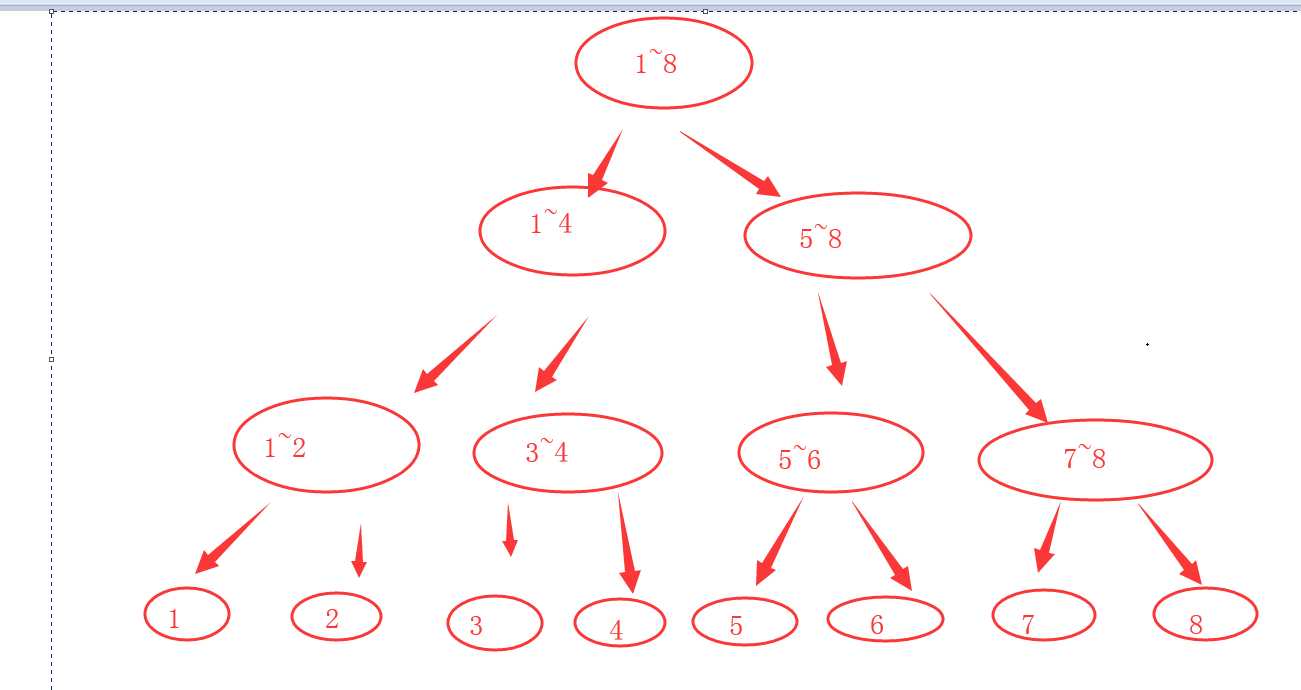
如图
1 预备知识
使用线段树记录的内容如下 指示某段线段的组合 以第一条线段为垂直 最后的线段的端点的X Y值
途中1~2 线段 和3~5线段 就是线段树节点1~5的子节点 那么线段树节点1~5 就记录1~5结合后的X Y 值以及两个子节点结合的角度值
由于3~5线段的XY 是以自己的第一条线段为垂直起点为0 0 计算出来的X Y
那么在于1~2线段合并的时候 并不是简单的将两子节点的X Y相加即可得到1~5线段的XY 而是要加入旋转了相对角度 该角度由记录1~5线段的线段树节点记录
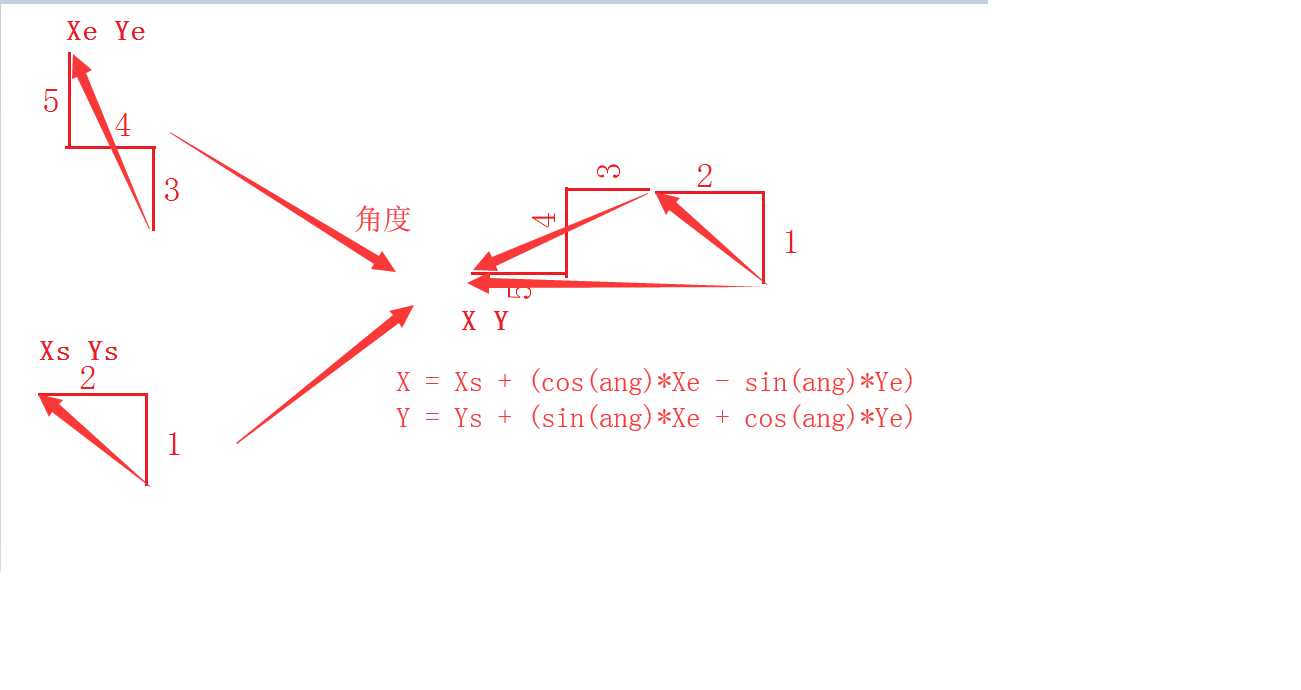
1~2线段部分的X Y值 旋转相对角度的公式推导如下
https://blog.csdn.net/hjq376247328/article/details/45113563
其实也就是
xNew = x * cosB - y * sinB
yNew = x * sinB + y * cosB
再来和 1~2线段的X Y相加即可得到1~5线段的X Y,并将该两子节点的相对角度记录在父节点中
预备知识讲完
2 解答步骤如下
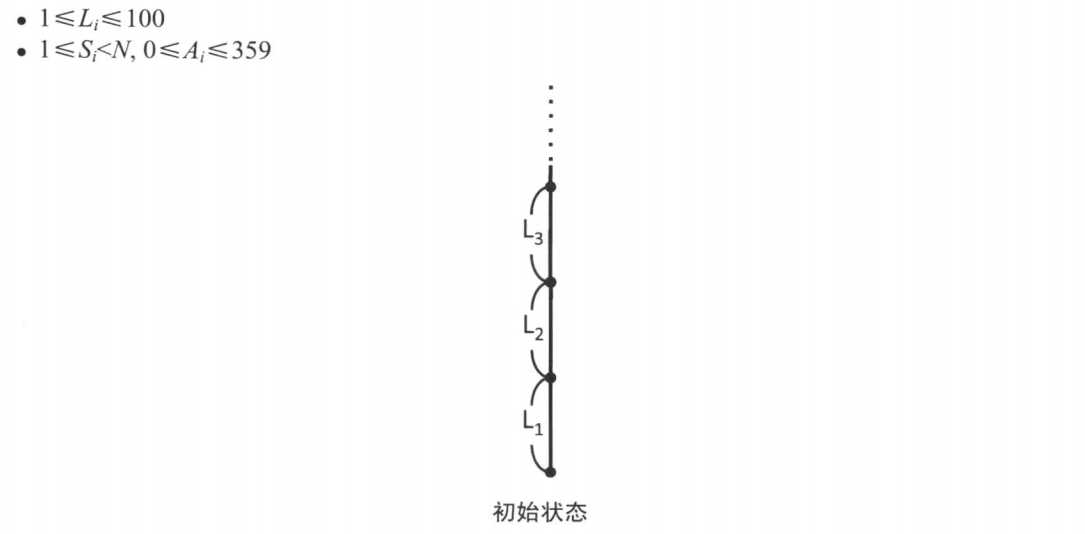
一 建造线段树 build(1,1,n); 由于每条线段都是垂直连接 所以X 均为0 相对角度全部为0
void build(int k,int l,int r) { angT[k]=x[k]=0.0; if(r==l) y[k]=L[l]; else { int lson=k*2, rson=k*2+1; int m=(l+r)/2; build(lson,l,m); build(rson,m+1,r); y[k]=y[lson]+y[rson]; } }
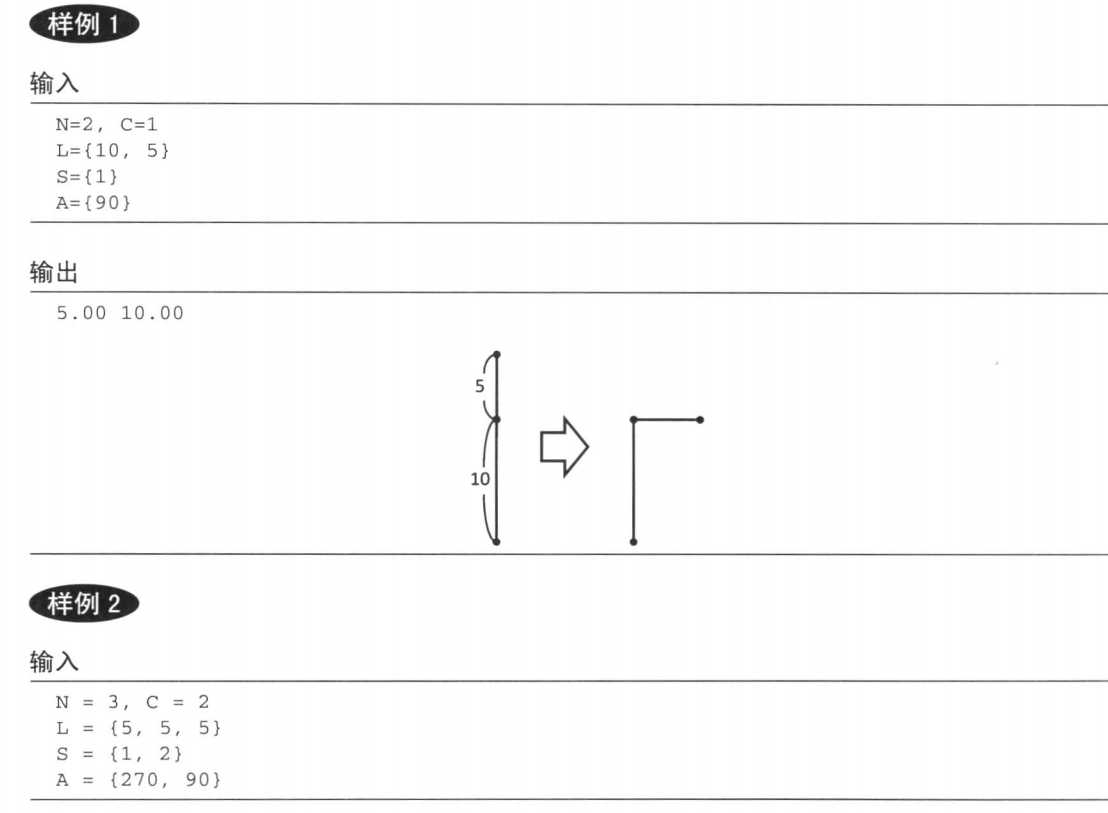
二 某段线段转动角度后
题意输入的角度是si和si+1逆时针角度而不是旋转的角度,而是需要转到的结果角度, 所以我们需要进行转换 。所以使用了pre数组记录每段线段与相邻线段的逆时针间隔角度,这样接收到题意输入角度a后
a-pre[s] 就是实际要转动的角度 而且需要更新pre[s] 以便下次计算
change(s,ang-pre[s],1,1,n); pre[s]=ang; // 要求改变为a度 考虑之前已改变过
chang()代码就是批量更新需要转换的角度和X Y
只有旋转的起点线段在当前线段树节点的左子节点 我们才更新当前线段树节点的角度记录
如图
假设节点4 向3旋转90度
那么合并1 2的时候无更新
合并3 4的时候 3~4节点的角度要在原来记录上再旋转90
合并1~2 3~4为1~4的时候无需更新角度 因为 3~4 已经旋转 与1 ~2的相对角度 并没有变化
同样 5~8节点流程中无变化
但是合并1~4 5~8节点的时候 角度需要旋转90
整个流程下来 4 5~8 角度均旋转更新1次 符合题目的集合意义
最后返回1~8节点记录的X Y即可
代码如下

1 #include <iostream> 2 #include <vector> 3 #include <math.h> 4 #include <stdio.h> 5 using namespace std; 6 const double PI = acos(-1.0); 7 const int N = 10005; 8 9 int n, c, L[N]; 10 double pre[N]; 11 12 double angT[N << 2]; 13 double x[N << 2], y[N << 2]; 14 15 void build(int k, int l, int r) { 16 angT[k] = x[k] = 0.0; 17 if (r == l) y[k] = L[l]; 18 else { 19 int lson = k * 2, rson = k * 2 + 1; 20 int m = (l + r) / 2; 21 build(lson, l, m); 22 build(rson, m + 1, r); 23 y[k] = y[lson] + y[rson]; 24 } 25 } 26 27 28 void change(int s, double ang, int k, int l, int r) { 29 if (s < l || l == r) return; // 操作位置不在范围内 或 区间长度为1 不作处理 30 else if (s <= r) { 31 int lson = k * 2, rson = k * 2 + 1; 32 int m = (l + r) / 2; 33 change(s, ang, lson, l, m); 34 change(s, ang, rson, m + 1, r); // 先处理左右子区间 35 if (s <= m) angT[k] += ang; // 操作位置位于区间的左子区间内 可根据左右子区间的向量更新 36 37 double sina = sin(angT[k]), cosa = cos(angT[k]); 38 x[k] = x[lson] + (x[rson] * cosa - y[rson] * sina); 39 y[k] = y[lson] + (x[rson] * sina + y[rson] * cosa); 40 } 41 } 42 43 44 /* 45 Sample Input 46 47 2 1 48 10 5 49 1 90 50 51 3 2 52 5 5 5 53 1 270 54 2 90 55 Sample Output 56 57 5.00 10.00 58 59 -10.00 5.00 60 -5.00 10.00 61 */ 62 63 int main() 64 { 65 while (~scanf("%d%d", &n, &c)) { 66 for (int i = 1; i <= n; i++) { 67 scanf("%d", &L[i]); 68 pre[i] = PI; 69 } 70 build(1, 1, n); 71 while (c--) { 72 int s, a; scanf("%d%d", &s, &a); 73 double ang = (double)a / 180.0*PI; 74 change(s, ang - pre[s], 1, 1, n); 75 pre[s] = ang; 76 printf("%.2f %.2f\n", x[1], y[1]); 77 } 78 printf("\n"); 79 } 80 81 return 0; 82 }
标签:向量 简单 sdn include 范围 cto https 变化 线段
原文地址:https://www.cnblogs.com/itdef/p/11984788.html
