标签:view ali end ram image slam plot not stand
https://github.com/stevenlovegrove/Pangolin
cmake_minimum_required(VERSION 2.8) project(chapter3) set(CMAKE_CXX_STANDARD 11) include_directories("/usr/include/eigen3") find_package(Pangolin REQUIRED) include_directories(${Pangolin_INCLUDE_DIRS}) add_executable(plotTrajectory plotTrajectory.cpp) target_link_libraries(plotTrajectory ${Pangolin_LIBRARIES})
#include <pangolin/pangolin.h> #include <Eigen/Core> #include <unistd.h> #include <fstream> // 本例演示了如何画出一个预先存储的轨迹 using namespace std; using namespace Eigen; // path to trajectory file string trajectory_file = "/home/qian/slambook2/ch3/examples/trajectory.txt"; void DrawTrajectory(vector<Isometry3d, Eigen::aligned_allocator<Isometry3d>>); int main(int argc, char **argv) { vector<Isometry3d, Eigen::aligned_allocator<Isometry3d>> poses; ifstream fin(trajectory_file); if (!fin) { cout << "cannot find trajectory file at " << trajectory_file << endl; return 1; } while (!fin.eof()) { //fin.eof()判断文件是否为空 double time, tx, ty, tz, qx, qy, qz, qw; fin >> time >> tx >> ty >> tz >> qx >> qy >> qz >> qw; Isometry3d Twr(Quaterniond(qw, qx, qy, qz)); //变换矩阵的旋转部分 Twr.pretranslate(Vector3d(tx, ty, tz));//变换矩阵的平移部分 poses.push_back(Twr); } cout << "read total " << poses.size() << " pose entries" << endl; // draw trajectory in pangolin DrawTrajectory(poses); return 0; } /*******************************************************************************************/ void DrawTrajectory(vector<Isometry3d, Eigen::aligned_allocator<Isometry3d>> poses) { // create pangolin window and plot the trajectory pangolin::CreateWindowAndBind("Trajectory Viewer", 1024, 768); glEnable(GL_DEPTH_TEST); glEnable(GL_BLEND); glBlendFunc(GL_SRC_ALPHA, GL_ONE_MINUS_SRC_ALPHA); pangolin::OpenGlRenderState s_cam( pangolin::ProjectionMatrix(1024, 768, 500, 500, 512, 389, 0.1, 1000), pangolin::ModelViewLookAt(0, -0.1, -1.8, 0, 0, 0, 0.0, -1.0, 0.0) ); pangolin::View &d_cam = pangolin::CreateDisplay() .SetBounds(0.0, 1.0, 0.0, 1.0, -1024.0f / 768.0f) .SetHandler(new pangolin::Handler3D(s_cam)); while (pangolin::ShouldQuit() == false) { glClear(GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT); d_cam.Activate(s_cam); glClearColor(1.0f, 1.0f, 1.0f, 1.0f); glLineWidth(2); for (size_t i = 0; i < poses.size(); i++) { // 画每个位姿的三个坐标轴 Vector3d Ow = poses[i].translation(); Vector3d Xw = poses[i] * (0.1 * Vector3d(1, 0, 0)); Vector3d Yw = poses[i] * (0.1 * Vector3d(0, 1, 0)); Vector3d Zw = poses[i] * (0.1 * Vector3d(0, 0, 1)); glBegin(GL_LINES); glColor3f(1.0, 0.0, 0.0); glVertex3d(Ow[0], Ow[1], Ow[2]); glVertex3d(Xw[0], Xw[1], Xw[2]); glColor3f(0.0, 1.0, 0.0); glVertex3d(Ow[0], Ow[1], Ow[2]); glVertex3d(Yw[0], Yw[1], Yw[2]); glColor3f(0.0, 0.0, 1.0); glVertex3d(Ow[0], Ow[1], Ow[2]); glVertex3d(Zw[0], Zw[1], Zw[2]); glEnd(); } // 画出连线 for (size_t i = 0; i < poses.size(); i++) { glColor3f(0.0, 0.0, 0.0); glBegin(GL_LINES); auto p1 = poses[i], p2 = poses[i + 1]; glVertex3d(p1.translation()[0], p1.translation()[1], p1.translation()[2]); glVertex3d(p2.translation()[0], p2.translation()[1], p2.translation()[2]); glEnd(); } pangolin::FinishFrame(); usleep(5000); // sleep 5 ms } }
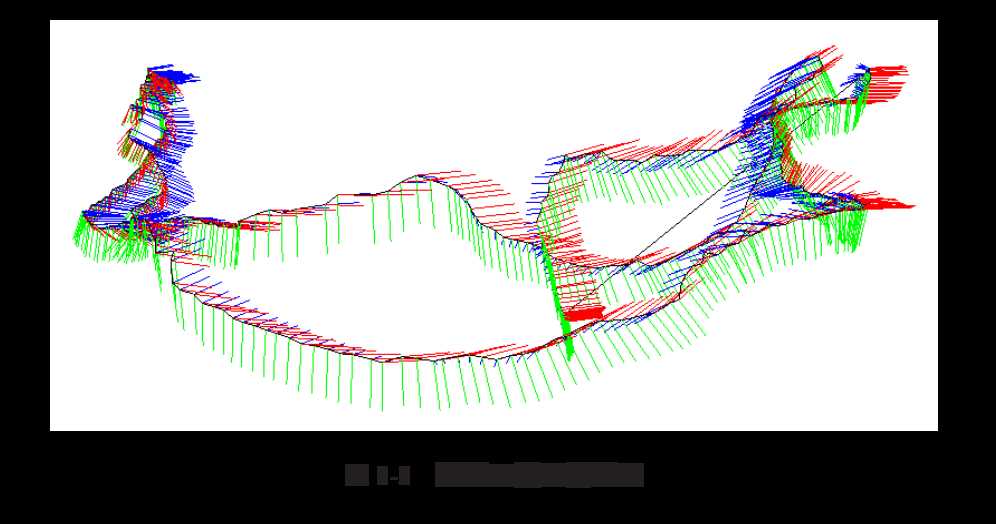
该程序演示了如何在 Panglin 中画出 3D 的位姿。我们用红、绿、蓝三种颜色画出每个位姿的三 个坐标轴(实际上我们计算了各坐标轴的世界坐标),然后用黑色线将轨迹连起来。
标签:view ali end ram image slam plot not stand
原文地址:https://www.cnblogs.com/long5683/p/11988220.html