标签:include 列表 map mint 这一 nothing ace lemp 参数表
bsoj6412 没找到出处。。。
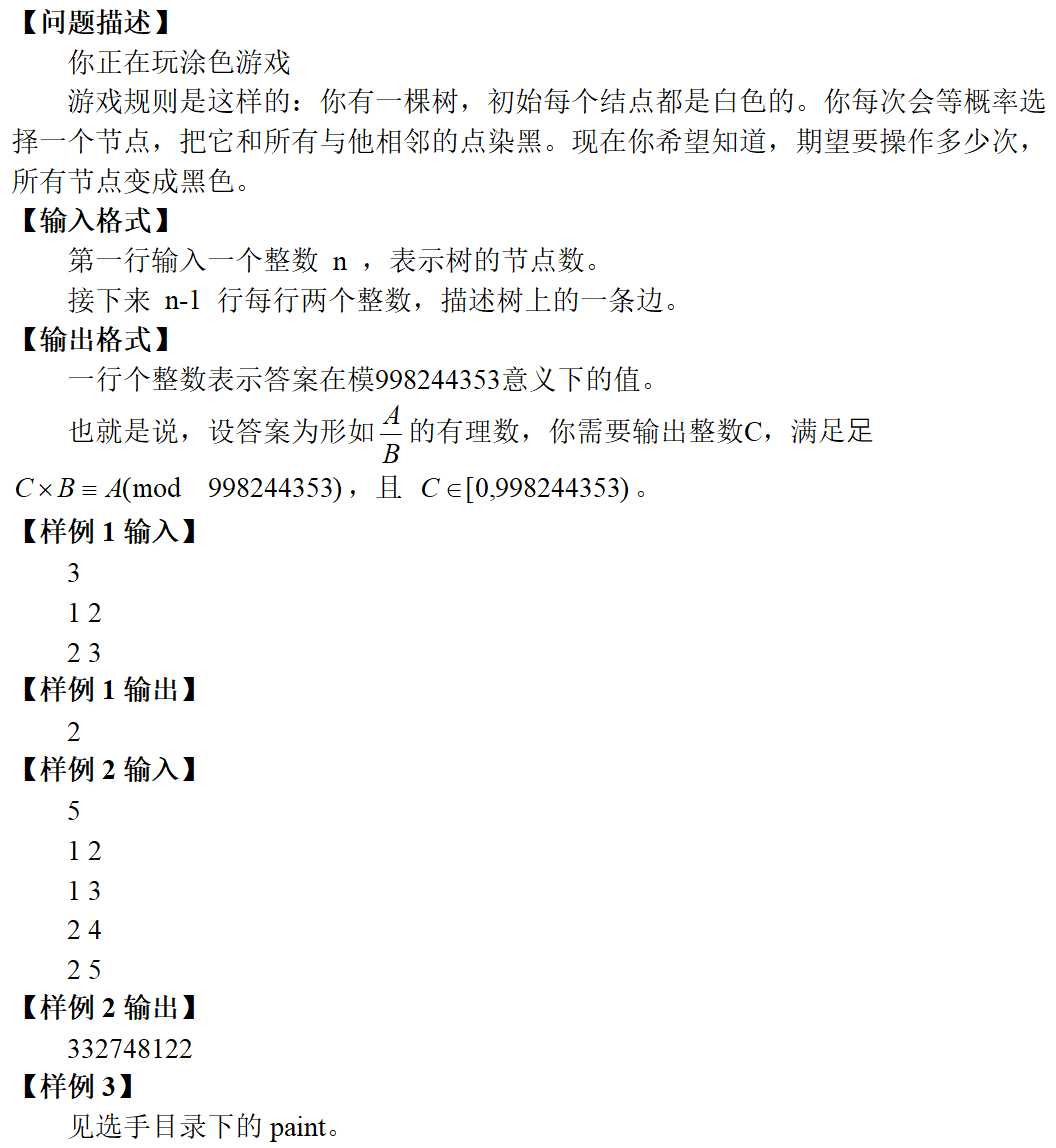
题意简述:给一颗树,一次操作定义为随机选择一个点,染掉该点和它周围一圈的点,问期望多少次染黑所有点。
这是道好题啊!全面考察了容斥、反演、期望和dp,有许多值得注意的细节。
首先肯定第一个想到的式子就是
\[ Ans = \sum_{i=1}^{\infty} i * P(在染第i次时刚好黑完) \]
这是根据期望的定义直接得到的。
然后发现这个\(i\)实在是非常的恶心,因为它居然和无穷有关。但既然是一个合法的期望题,这个\(i\)必然可以找到某种转化的手段把它弄成一个能算的且收敛的东西,比如等比数列级数之类的。
于是这里有一个套路化法
\[
\sum_{i=1}^{\infty} i * P(x=i) = \sum_{i=0}^{\infty} P(x>i)
\]
(\(P(A)\)代表事件\(A\)发生的概率)
就是改了改枚举的方式,随便想一想应该能够明白了吧(
总之,根据上式我们就可以得到
\[
Ans = \sum_{i=0}^{\infty} P(染i次未黑完)
\]
我们成功把\(i\)丢到了\(P\)里面去。但是我们还是没有办法求这个东西。
发现虽然选点可以进行无数次,但是最多只会选有限个点,许多选点是重复的。用实际选择的点的个数,我们可以在不可计算的无限和可计算的有限之间搭上一座桥梁。我们考虑将上面的\(P\)进行一个拆分,得到
\[
Ans = \sum_{i=0}^{\infty} \sum_{k=0}^{n} P(选i次恰好选中某k个点) * N(k个点未黑完整棵树)
\]
\(N(A)\)代表事件\(A\)的方案数
注意式子中“某”的含义。可以这样理解这个式子:
我钦定了某\(k\)个点
首先我想知道:进行\(i\)次随机选择,选中且只选中这\(k\)个点的概率
然后再判断这\(k\)个点是否能让整棵树黑完。如果不能,则将这部分概率计入。
将所有可能钦定的情况合起来就是\(N\),而选择的概率实际上和树形结构无关,选中任意\(k\)个点的概率都是一样的,所以直接乘起来即可。
好,理解了上式,我们来仔细研究\(P\)和\(N\)到底是什么。
首先研究\(P\)。首先如果恰好选中某\(k\)个点,那么必然先得保证这\(i\)次都不能选中其他的点。概率是
\[
(\frac{k}{n})^i
\]
但这样计算显然是有问题的。因为可能出现有点一次都没有被选中的情况,而这不满足我们“恰好选中”的要求。换句话说,我们只能计算\(P(|被选中的点| \le p)\)。而实际上,我们需要的是 \(P(|选中的点集| = p)\)。
容易想到容斥掉它。
考虑枚举一次都没有被选中的点,经过仔细思考,我们能够艰难的得到
\[
P(选i次恰好选中某k个点) = \sum_{p=0}^k C_k^p (-1)^p (\frac{k-p}{n})^i
\]
我无力解释这个式子...各位自己尝试理解一下吧...
把某个点一次都没有被选中画成一个圆圈,用Venn图的形式可能有助于理解。
虽然难以理解...不过好在可以用二项式反演推导。
\[
f(n) = \sum_{i=0}^n C_n^i g(i) \iff g(n) = \sum_{i=0}^n C_n^i (-1)^i f(i)
\]
套入本题
\[
g_i(k) = P(选i次恰好选中某k个点)
\]
\[ f_i(k) = (\frac{k}{n})^i \]
这样就好懂多了,,
不管怎么说,我们终于搞到了\(P\)表达式,而且这个表达式里\(i\)是指数!带回原式说不定可以用等比级数干掉它。
为了方便书写,令\(a_k = N(k个点未黑完整棵树)\)
\[
\begin{align}
Ans &= \sum_{i=0}^{\infty} \sum_{k=0}^{n} a_k \sum_{p=0}^k C_k^p (-1)^p (\frac{k-p}{n})^i \ &= \sum_{k=0}^{n} a_k \sum_{p=0}^k C_k^p (-1)^{k-p} \sum_{i=0}^{\infty} (\frac{p}{n})^i \\end{align}
\]
由于当\(|q| < 1\)时,有
\[
\begin{align}
\sum_{i=0}^{\infty} q^i &= \lim_{n \to \infty} \frac{q^{n+1}-1}{q-1} \ &= \frac{1}{1-q}
\end{align}
\]
故
\[
Ans = \sum_{k=0}^{n} a_k \sum_{p=0}^k C_k^p (-1)^{k-p} \frac{n}{n-p}
\]
(当\(k=p=n\)时,由于上一步转化要求\(|q|<1\),而此时\(|q|=1\),会出现级数发散的情况。但发现\(a_n\)显然一定等于\(0\),所以直接不算\(k=n\)的情况即可)
直接枚举是\(O(n^2)\)的,现在我们只需要求出每一个\(a_k = N(k个点未黑完整棵树)\)
首先可以做一步简单容斥简化问题
\[ N(k个点未黑完整棵树) = C_n^k - N(k个点黑完整棵树) \]
求\(N(k个点黑完整棵树)\),很容易想到树上背包
实际上就是在树上分配选点,也就是一个背包,而方案数背包的实质是卷积,所以就是用树形dp维护卷积合并。
开始写状态。
\(f[u][0/1][0/1]\)表示只考虑以\(u\)为根的子树,父亲是否被选择,自己是否被选择的方案数。(可能有更简单的状态表示,但我觉得这种更好想更靠谱)
随便写写就有转移方程了。
\[ f[u][0][0] = f[u][1][0] - \prod_v f[v][0][0] \]
没有父亲援助,自己也不选,只能靠儿子。儿子节点只需要有一个选就可以养活自己。也就是儿子随便乱选减去儿子一个都不选的情况。
\[
f[u][0][1] = I * \prod_v (f[v][1][0] + f[v][1][1])
\]
自己选了,上下随便。
\[
f[u][1][0] = \prod_v ( f[v][0][0] + f[v][0][1] )
\]
父亲选了,自己不选,下面随便。
\[
f[u][1][1] = f[u][0][1]
\]
自己选了,上下随便。
照着dp即可。
\[
N(k个点黑完整棵树) = f[root][0][0][k]+f[root][0][1][k]
\]
顺着之前倒着带回去行了。
显然是\(O(n^2)\)的。
一次卷积\(O(n ^ 2)\),会向上合并\(O(n)\)次...
诶?这不是\(O(n^3)\)的吗?
实则不然。
设\(sz[u]\)为以\(u\)为根的子树大小。显然可能涉及的卷积长度\(len \le sz[u]\)
于是考虑每个节点\(u\)下的所有儿子\(v\)合并起来的耗时。
\[
\sum_{v_1 \not= v_2} sz[v_1] *sz[v_2] = sz[u]^2 - \sum_v sz[v]^2 \\]
后面减去的和式,将抵消掉所有儿子节点产生的时间复杂度!
所以真正的复杂度是\(O(n^2)\)
妙啊
爆拆期望得无穷级数,尝试去掉无穷,套路化法将\(i\)化入\(P\)。
拆掉\(P\)在无穷与有限间建立联系,分别处理\(P\)和\(N\)。
\(P\)可容斥得出,带回原式用等比级数干掉无穷的\(i\)
\(N\)用树上背包可解,仔细推转移即可
#include<iostream>
#include<cstdio>
#include<cmath>
#include<cstring>
#include<ctime>
#include<cstdlib>
#include<algorithm>
#include<queue>
#include<vector>
#include<map>
#include<set>
typedef long long ll;
using namespace std;
ll Rd(){
ll ans=0;char c=getchar();
while(c<'0'||c>'9') c=getchar();
while(c>='0'&&c<='9') ans=ans*10+c-'0',c=getchar();
return ans;
}
const ll MOD=998244353;
ll QPow(ll x,ll up){
x=(x+MOD)%MOD;
ll ans=1;
while(up)
if(up%2==0) x=x*x%MOD,up/=2;
else ans=ans*x%MOD,up--;
return ans;
}
ll Inv(ll x){
return QPow(x,MOD-2);
}
const ll PTN=1005;
ll N;
ll fac[PTN],facInv[PTN];
void FacInit(){
fac[0]=1;for(ll i=1;i<=N;i++) fac[i]=fac[i-1]*i%MOD;
facInv[N]=Inv(fac[N]);for(ll i=N-1;i>=1;i--) facInv[i]=facInv[i+1]*(i+1)%MOD;
facInv[0]=1;
}
ll C(ll n,ll m){
if(n<m) return 0;
return fac[n]*facInv[m]%MOD*facInv[n-m]%MOD;
}
struct Edge{
ll u,v;ll nxt;
}edge[PTN*2];
ll graM,last[PTN];
void GraphInit(){graM=0;for(ll i=0;i<PTN;i++) last[i]=0;}
void AddBscEdge(ll u,ll v){
edge[++graM]=(Edge){u,v,last[u]};
last[u]=graM;
}
void AddDbEdge(ll u,ll v){
AddBscEdge(u,v);AddBscEdge(v,u);
}
class Func{public:
ll sav[PTN];ll len;
Func(){}
Func(ll len){
this->len=len;
for(ll i=0;i<=len;i++) sav[i]=0;
}
void Resize(ll nwLen){
for(ll i=len+1;i<=nwLen;i++) sav[i]=0;
len=nwLen;
}
ll& operator [] (ll idx){return sav[idx];}
/*void Debug(){
cout<<len<<":";
for(ll i=0;i<=len;i++) cout<<sav[i]<<",";cout<<endl;
}*/
};
Func operator + (Func A,Func B){
Func C(max(A.len,B.len));
A.Resize(C.len);B.Resize(C.len);
for(ll i=0;i<=C.len;i++) C[i]=A[i]+B[i]%MOD;
return C;
}
Func operator - (Func A,Func B){
Func C(max(A.len,B.len));
A.Resize(C.len);B.Resize(C.len);
for(ll i=0;i<=C.len;i++) C[i]=A[i]-B[i]%MOD;
return C;
}
Func operator * (Func A,Func B){
Func C(A.len+B.len);
for(ll i=0;i<=A.len;i++)
for(ll j=0;j<=B.len;j++)
C[i+j]=(C[i+j]+A[i]*B[j])%MOD;
return C;
}
Func I(){
Func A(1);A[1]=1;return A;
}
Func E(){
Func A(0);A[0]=1;return A;
}
Func f[PTN][2][2];
void FDFS(ll u,ll father){
Func s00,s00_01,s10_11;
s00=s00_01=s10_11=E();
for(ll i=last[u];i!=0;i=edge[i].nxt){
ll v=edge[i].v;if(v==father) continue;
FDFS(v,u);
s00=s00*f[v][0][0];
s00_01=s00_01*(f[v][0][0]+f[v][0][1]);
s10_11=s10_11*(f[v][1][0]+f[v][1][1]);
}
f[u][0][0]=s00_01-s00;
f[u][0][1]=I()*s10_11;
f[u][1][0]=s00_01;
f[u][1][1]=I()*s10_11;
}
ll A[PTN];
void Solve(){
FDFS(1,0);
for(ll k=0;k<=N;k++) A[k]=(C(N,k)-(f[1][0][0][k]+f[1][0][1][k])%MOD+MOD)%MOD;
ll Ans=0;
for(ll k=0;k<N;k++){//注意<N
ll t=0;
for(ll p=0;p<=k;p++){
ll alpha;
if((k-p)%2==0) alpha=1;
else alpha=(-1+MOD)%MOD;
t=(t+C(k,p)*alpha%MOD*N%MOD*Inv(N-p)%MOD)%MOD;
}
t=t*A[k]%MOD;
Ans=(Ans+t)%MOD;
}
cout<<Ans;
}
int main(){
N=Rd();FacInit();
GraphInit();
for(ll i=1;i<N;i++){
ll u=Rd(),v=Rd();
AddDbEdge(u,v);
}
Solve();
return 0;
}minmax容斥标准式:
\[
\max(S) = \sum_{T \subseteq S \\ T \not= \varnothing} (-1)^{|T|-1} \min(T)
\]
由于期望具有线性性,它可以拓展到期望:
\[
E(\max(S)) = \sum_{T \subseteq S \\ T \not= \varnothing} (-1)^{|T|-1} E(\min(T))
\]
然后把这个式子映射到本题中来。
\(S\)就是整棵树。下面把操作了多少次称为“时间”。
对于一种染色方案,集合中的元素可以看做,每一个点会在一个确定的时间从白色染成黑色,\(\max(S)\)就表示染黑集合中所有点的耗时;\(\min(T)\)表示至少染黑集合中的某一个点的耗时。
这时,我们可以直接遍历一道\(S\)得到\(\max(S)\)
套上期望后:\(E(\max(S))\)表示染黑集合中所有点的期望耗时,也就是本题所要求的答案;\(E(\min(T))\)表示至少染黑集合中的某一个点的期望耗时。
捋一下思路,由于期望不满足\(E(\max(S)) = \max_{x \in S} E(x)\),无法直接遍历求\(\max\)。但是因为期望具有线性性,可以借助minmax容斥来达到目的。 (这是一类套路题型)
于是思考\(E(\min(T))\)是否容易求得。容易发现
\[
E(\min(T)) = \frac{n}{|U_T|}
\]
\(|U_T|\)表示选择后能让\(T\)中某个节点变黑的点的集合。
显然\(S\)、\(T\)、\(U_T\)有这样的关系
\[
T \subseteq U_T \subseteq S
\]
将表达式带入原式中
\[
E(\max(S)) = \sum_{T \subseteq S \\ T \not= \varnothing} (-1)^{|T|-1} \frac{n}{|U_T|}
\]
枚举子集是复杂度的瓶颈。不过发现枚举中许多项的\(|U_T|\)都是相同的,考虑把它单独拿出来枚举。
\[
E(\max(S)) = \sum_{u=1}^n \frac{n}{u} \sum_{T \subseteq S \\ T \not= \varnothing \\ |U_T|=u} (-1)^{|T|-1}
\]
也就是说,现在我们只需快速求得
\[
\sum_{T \subseteq S \\ T \not= \varnothing \\ |U_T|=u} (-1)^{|T|-1}
\]
思考这式子的意义。其实它就是一个带上了容斥系数的所有\(T\)的方案数之和,也就是\(|T|\)为奇的方案数减去\(|T|\)为偶的方案数。
尝试通过树形dp解决
首先简单考虑一下所需的状态。考虑以某个点为根的子树,我们需要记录\(|U_T|\),这是我们上面枚举的基础;\(|T|\)是容斥系数,我们需要记录它的奇偶性。
可以想到转移大概的形式是在\(U_T\)上的卷积。
首先有一个小Trick,可以压掉记录\(|T|\)奇偶性这一维
\[
\sum_{T \subseteq S \\ T \not= \varnothing \\ |U_T|=u} (-1)^{|T|-1} = - \sum_{T \subseteq S \\ T \not= \varnothing \\ |U_T|=u} (-1)^{|T|}
\]
根据上式,我们在dp时求\(|T|\)为偶的方案数减去\(|T|\)为奇的方案数,最后计算答案时乘上个\(-1\)即可。
这么做的原因是可以压缩掉记录\(|T|\)奇偶性这一维。
比如有两个对象\(A=(x_1,y_1)\),\(B(x_2,y_2)\)需要合并为\(C\)(第1个参数表示\(|T|\)为偶的方案数,第2个参数表示\(|T|\)为奇的方案数)
\[
C = (x_1 x_2 + y_1 y_2, x_1 y_2 + x_2 y_1)
\]
如果将对象改写为单个变量记录:\(A=x_1 - y_1\),\(B = x_2 - y_2\)
\[
\begin{align}
C &= x_1 x_2 + y_1 y_2 - (x_1 y_2 + x_2 y_1) \&= (x_1 - y_1) (x_2 - y_2) \&= A B
\end{align}
\]
而对象的值就是我们所求的(考虑容斥系数的方案数)。成功压缩。
如果不做上面那一个Trick的转化,压缩状态需要 正*正=负 和 负*负=正,而这显然是不成立的。
如果所有情况的\(T\)内新增一个节点,原来\(|T|\)为奇的变为偶,原来为偶的变为奇。
如果不压缩,操作应该是交换\(x\)和\(y\)
如果压缩,只需对dp值乘上\(-1\)即可
我们的dp实际上是用背包分配\(|U_T|\)。
状态压缩后,剩下的主要问题在于合并时\(|U_T|\)、\(|T|\)发生的变化对dp值造成的影响,而这变化与当前点\(u\)到底属于哪个集合密切相关。
由于转移情况复杂,而背包的本质是卷积,所以用封装性良好的卷积实现。
令\(f[u][d=0/1/2]\)表示仅考虑\(S\)是\(u\)为根的子树时,以\(x\)为下标的列表
\[
\{\sum_{T \subseteq S \\ T \not= \varnothing \\ |U_T|=x \\ u \in Q_d} (-1)^{|T|} \Large | \normalsize \ x \in [0,|S|]\}
\]
\(Q_d\)是对\(u\)的限制,具体为
\(Q_0\):\(u \in S\)且\(u \not \in U_T\)
\(Q_1\):\(u \in U_T\)且\(u \not \in T\)
\(Q_2\):\(u \in T\)
定义\(I\),\(I[1]=1\)?,其余皆为\(0\),结合卷积可以表示向\(U_T\)内新增一个点。
我们开始处理转移。
\[
f[u][0] = \prod_{v} f[v][0] + f[v][1]
\]
意思是若\(u\)不在\(U_T\)里,则它的所有儿子一定不能在\(T\)里。
\[
f[u][1] = \left( \left( \prod_v f[v][0] + f[v][1] +f[v][2] \right) - f[u][0] \right) * I
\]
若\(u\)在\(U_T\)内而\(u\)不在\(T\)内,则\(u\)的儿子中至少有一个是\(T\)中的点。这可以转化为所有情况的答案减去所有儿子都不在\(T\)中的答案。最后卷上\(I\)为\(U_T\)新增\(u\)。
\[
f[u][2] = - \left( I * \prod_v \left( f[v][0] * I + f[v][1] + f[v][2] \right) \right)
\]
若\(u\)在\(T\)内,那些不在\(U_T\)内的\(u\)的儿子现在就应该属于\(T\)了。然后既然\(u\)属于\(T\),那么\(u\)也属于\(U_T\),卷上\(I\)为\(U_T\)新增\(u\)。最后,由于\(T\)新增了个点,也就是说所有项的容斥系数\(+1\),整体变号即可。
最后算答案,参考早前化出的答案式即可。
答案式部分显然\(O(n)\)
树形dp卷积的时间复杂度为\(O(n^2)\),见做法1对dp的时间复杂度证明。
首先我们发现这道题适用于minmax容斥的套路,于是将难求的\(E(max(S))\)转化到容易求的\(E(min(T))\)。
然后我们再想办法优化枚举子集,发现\(U_T\)是一个关键的变量,于是将其提出来单独枚举,问题转化为求带有容斥系数的方案数。
回头观察题面发现是树状结构,必然有其特殊性质,于是猜想用树形dp解决。讨论合并时\(U_T\)和\(T\)是如何变化的,能够列出转移方程式。在中间想到了压缩状态,简化了dp。
#include<iostream>
#include<cstdio>
#include<cstring>
#include<cmath>
#include<ctime>
#include<cstdlib>
#include<algorithm>
#include<queue>
#include<vector>
#include<map>
#include<set>
using namespace std;
typedef long long ll;
ll Rd(){
ll ans=0;char c=getchar();
while(c<'0'||c>'9') c=getchar();
while(c>='0'&&c<='9') ans=ans*10+c-'0',c=getchar();
return ans;
}
const ll MOD=998244353;
ll QPow(ll x,ll up){
x=(x+MOD)%MOD;
ll ans=1;
while(up)
if(up%2==0) x=x*x%MOD,up/=2;
else ans=ans*x%MOD,up--;
return ans;
}
ll Inv(ll x){
return QPow(x,MOD-2);
}
const ll PTN=1E3+5;
struct Edge{
ll u,v;ll nxt;
}edge[PTN*2];
ll N,graM,last[PTN];
void GraphInit(){graM=0;for(ll i=0;i<PTN;i++) last[i]=0;}
void AddBscEdge(ll u,ll v){
edge[++graM]=(Edge){u,v,last[u]};
last[u]=graM;
}
void AddDbEdge(ll u,ll v){
AddBscEdge(u,v);AddBscEdge(v,u);
}
class Func{public:
ll sav[PTN];
ll len;
ll& operator [] (ll idx){return sav[idx];}
Func(){}
Func(ll len){
this->len=len;
for(ll i=0;i<=len;i++) sav[i]=0;
}
void Expand(ll nwLen){
for(ll i=len+1;i<=nwLen;i++) sav[i]=0;
len=nwLen;
}
Func operator - (){
Func B;B.len=len;
for(ll i=0;i<=len;i++) B[i]=(-sav[i]+MOD)%MOD;
return B;
}
/*void Debug(){
cout<<len<<":";
for(ll i=0;i<=len;i++) cout<<sav[i]<<',';cout<<endl;
}*/
};
Func E(){
Func A(0);A[0]=1;
return A;
}
Func I(){
Func A(1);A[1]=1;
return A;
}
Func operator + (Func A,Func B){
Func C(max(A.len,B.len));
A.Expand(C.len);B.Expand(C.len);
for(ll i=0;i<=C.len;i++) C[i]=(A[i]+B[i])%MOD;
return C;
}
Func operator - (Func A,Func B){
Func C(max(A.len,B.len));
A.Expand(C.len);B.Expand(C.len);
for(ll i=0;i<=C.len;i++) C[i]=(A[i]-B[i]+MOD)%MOD;
return C;
}
Func operator * (Func A,Func B){
Func C(A.len+B.len);
for(ll i=0;i<=A.len;i++)
for(ll j=0;j<=B.len;j++)
C[i+j]=(C[i+j]+A[i]*B[j])%MOD;
return C;
}
Func f[PTN][3];
void DFS(ll u,ll fa){
f[u][0]=f[u][1]=f[u][2]=E();
for(ll i=last[u];i!=0;i=edge[i].nxt){
ll v=edge[i].v;if(v==fa) continue;
DFS(v,u);
f[u][0]=f[u][0]*(f[v][0] +f[v][1]);
f[u][1]=f[u][1]*(f[v][0] +f[v][1]+f[v][2]);
f[u][2]=f[u][2]*(f[v][0]*I()+f[v][1]+f[v][2]);
}
f[u][1]=(f[u][1]-f[u][0])*I();
f[u][2]=-(f[u][2]*I());
}
void Solve(){
DFS(1,0);
ll Ans=0;
for(ll i=1;i<=N;i++){//注意从1开始,因为minmax容斥不包含空集
Ans=(Ans+N*Inv(i)%MOD*(f[1][0][i]+f[1][1][i]+f[1][2][i]))%MOD;
}
cout<<(-Ans+MOD)%MOD;
}
int main(){
N=Rd();
GraphInit();
for(ll i=1;i<N;i++){
ll u=Rd(),v=Rd();
AddDbEdge(u,v);
}
Solve();
return 0;
}我觉得两种解法都很妙啊(
解题思路很具有参考价值,实为一道期望好题!
标签:include 列表 map mint 这一 nothing ace lemp 参数表
原文地址:https://www.cnblogs.com/sun123zxy/p/12008794.html