标签:平面 计算 nbsp 交点 最小 提取 str mamicode 结构
1目的
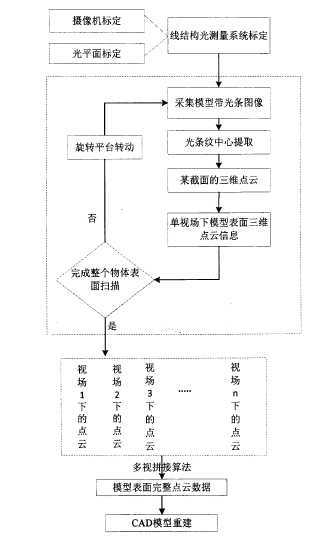
完成物体的三维重建
2结构光系统标定
(a)相机标定,标定出相机的内外参数;
(b)结构光条纹中心的提取
(3)结构光标定即光平面的标定
即将世界坐标系下的三维点转换为相机坐标系下的三维点,通过多个相机下的三维坐标点拟合出光平面,然后拟合的光平面可以用来完成三维重建。
3光平面标定的步骤
(1)求解光平面上标定特征点的局部世界坐标系
点AQBC为世界局部坐标系下的点;点aqbc为图像坐标系下的点;Q点为我们所需要求取的特征点,棋盘格上面的任意直线与线结构光之间的交点
通过移动标定板,可以取到不同的Q点,一般Q的个数为4个
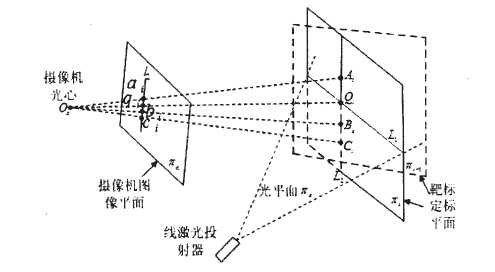
图1 Q点的获取原理图
交比不变原理

Q点图像坐标(x,y)可以通过算法进行计算,Q点世界坐标系中坐标(x1,y1,0)可以通过交比不变原理进行求取,其中点ABC为棋盘格上的点,三维坐标是已知的。
(2)光平面求取
光平面方程 Ax+By+Cz+D=0
对光平面方程变化:z=a0x+a1y+a2 其中a0=-A/C,a1=-B/C,a2=-D/C,C≠0,
最小二乘法方程


求取最小距离: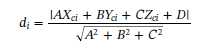
4三维重建原理
标签:平面 计算 nbsp 交点 最小 提取 str mamicode 结构
原文地址:https://www.cnblogs.com/zi-song/p/12077992.html