标签:nbsp data pack second over back inf div ddr
机械臂控制器中Background task通过UDP向外部程序每隔50ms循环发送当前各轴位置:

1 package sampleBackgroundTask; 2 3 import javax.inject.Inject; 4 import java.util.concurrent.TimeUnit; 5 import com.kuka.roboticsAPI.applicationModel.tasks.CycleBehavior; 6 import com.kuka.roboticsAPI.applicationModel.tasks.RoboticsAPICyclicBackgroundTask; 7 import com.kuka.roboticsAPI.deviceModel.JointPosition; 8 import com.kuka.roboticsAPI.deviceModel.LBR; 9 import java.net.*; 10 import java.io.IOException; 11 12 13 public class BackgroundTask extends RoboticsAPICyclicBackgroundTask { 14 @Inject 15 private LBR robot; 16 17 byte[] posArr; 18 int port = 30003; 19 InetAddress IP = null; 20 DatagramSocket datagramSocket = null; 21 DatagramPacket packet; 22 23 @Override 24 public void initialize() { 25 // initialize your task here 26 initializeCyclic(2000, 50, TimeUnit.MILLISECONDS, CycleBehavior.BestEffort); 27 28 try { 29 datagramSocket = new DatagramSocket(); 30 IP = InetAddress.getByName("192.168.1.50"); // get PC‘s address 31 } 32 catch (SocketException e) { e.printStackTrace(); } 33 catch (UnknownHostException e) { e.printStackTrace(); } 34 } 35 36 @Override 37 public void runCyclic() { 38 // your task execution starts here 39 JointPosition jPos = robot.getCurrentJointPosition(); 40 posArr = jPos.toString().getBytes(); 41 packet = new DatagramPacket(posArr, posArr.length, IP, port); 42 try { 43 datagramSocket.send(packet); 44 } 45 catch (IOException e) 46 { e.printStackTrace(); } 47 } 48 }
虚拟模型关节设为Passive模式,VREP中的Lua代码获取KUKA iiwa各轴位置并设置关节角:
1 function sysCall_init() 2 -- do some initialization here: 3 local socket = require ‘socket‘ 4 local host = "192.168.1.50" 5 local port = 30003 6 udp = assert(socket.udp()) 7 udp:settimeout(-1) 8 assert(udp:setsockname(host, port)) 9 10 -- Get joint handles 11 jointHandles = {-1,-1,-1,-1,-1,-1,-1} 12 for i=1,7,1 do 13 jointHandles[i] = sim.getObjectHandle(‘LBR_iiwa_7_R800_joint‘..i) 14 end 15 end 16 17 18 function sysCall_actuation() 19 local data,receip,receport = udp:receivefrom() 20 if data then 21 --print("udp:receivefrom: " .. data .. receip, receport) 22 local jointPositions = getJointPositions(data) 23 for i=1,7,1 do 24 sim.setJointPosition(jointHandles[i], jointPositions[i]) 25 end 26 end 27 end 28 29 30 function getJointPositions(s) 31 local result = {} 32 local s = string.sub(s, 2, -2) -- Return a substring of the string 33 for match in string.gmatch(s, "[^,]+") do 34 table.insert(result, tonumber(match)) 35 end 36 return result 37 end
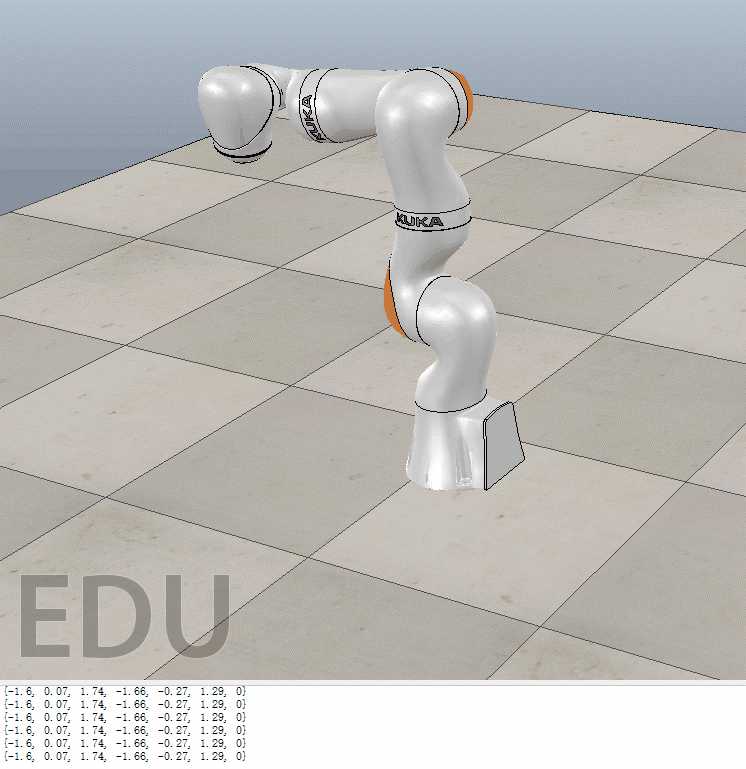
手动拖拽实际的机械臂,VREP中的虚拟模型按照轴的反馈位置实时更新:
标签:nbsp data pack second over back inf div ddr
原文地址:https://www.cnblogs.com/21207-iHome/p/12093086.html
