标签:sig inpu img holding batch turn imu datasets 模块
深度残差收缩网络是一种新颖的深度学习算法,实际上是深度残差网络的升级版本,能够在一定程度上提高深度学习方法在含噪数据上的特征学习效果。
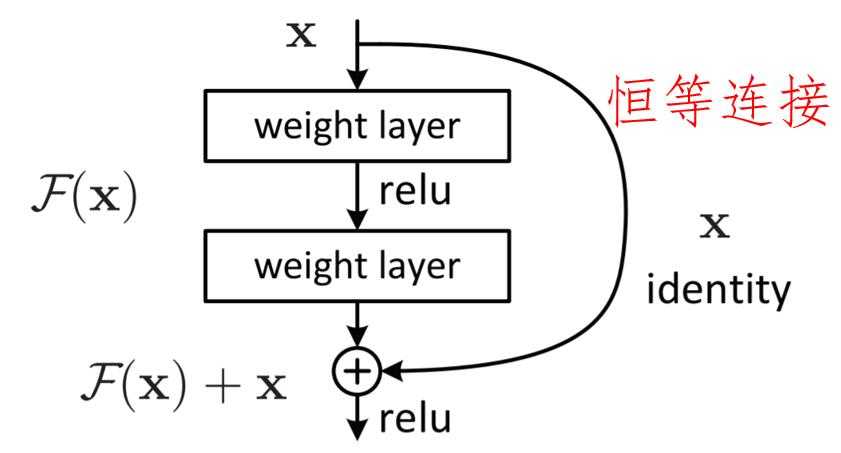
首先,简单回顾一下深度残差网络,深度残差网络的基本模块如下图所示。相较于普通的卷积神经网络,深度残差网络引入了跨层的恒等映射,来减小模型训练的难度,提高准确率。
然后,在深度残差网络的基础上,深度残差收缩网络引入了一个小型的子网络,用这个子网络学习得到一组阈值,对特征图的各个通道进行软阈值化。这个过程其实可以看成一个可训练的特征选择的过程。具体而言,就是通过前面的卷积层将重要的特征转换成绝对值较大的值,将冗余信息所对应的特征转换成绝对值较小的值;通过子网络学习得到二者之间的界限,并且通过软阈值化将冗余特征置为零,同时使重要的特征有着非零的输出。
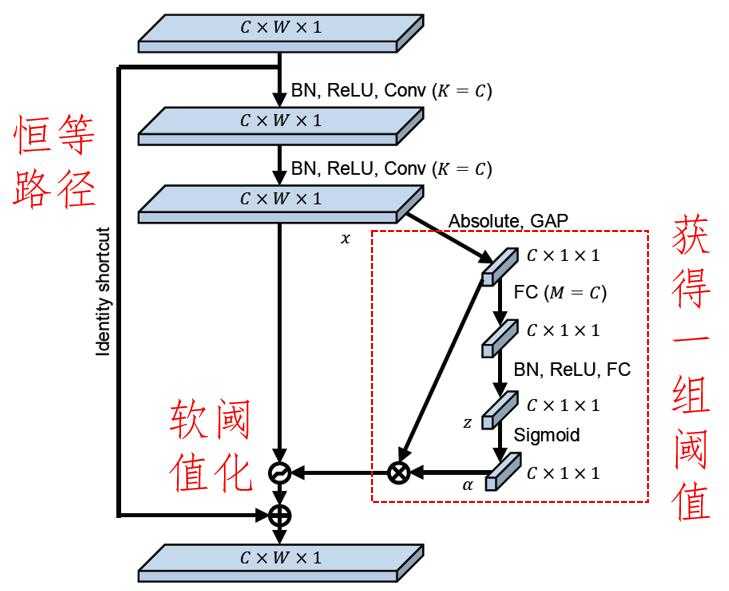
深度残差收缩网络其实是一种通用的方法,不仅可以用于含噪数据的特征学习,也可以用于不含噪声数据的特征学习。这是因为,深度残差收缩网络中的阈值是根据样本情况自适应确定的。换言之,如果样本中不含冗余信息、不需要软阈值化,那么阈值可以被训练得非常接近于零,从而软阈值化就相当于不存在了。
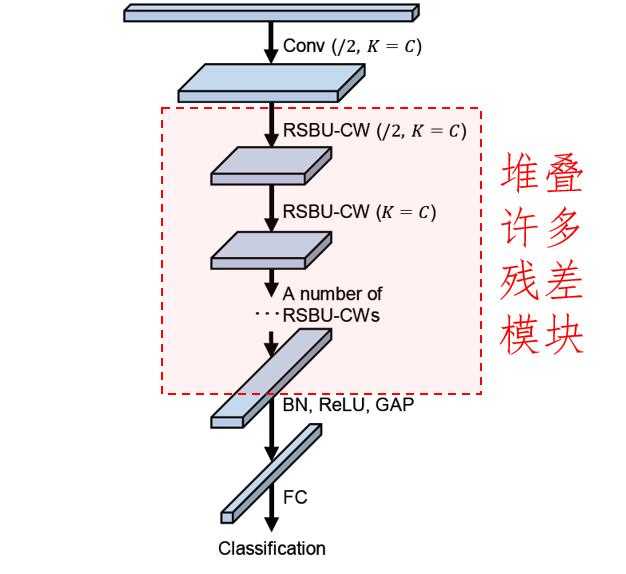
最后,堆叠一定数量的基本模块,就得到了完整的网络结构。
利用深度残差收缩网络进行MNIST数据集的分类,可以看到,效果还是不错的。下面是深度残差收缩网络的程序:
#!/usr/bin/env python3
# -*- coding: utf-8 -*-
"""
Created on Thu Dec 26 07:46:00 2019
Implemented using TensorFlow 1.0 and TFLearn 0.3.2
M. Zhao, S. Zhong, X. Fu, et al., Deep Residual Shrinkage Networks for Fault Diagnosis,
IEEE Transactions on Industrial Informatics, 2019, DOI: 10.1109/TII.2019.2943898
@author: me
"""
import tflearn
import tensorflow as tf
from tflearn.layers.conv import conv_2d
# Data loading
from tflearn.datasets import mnist
X, Y, testX, testY = mnist.load_data(one_hot=True)
X = X.reshape([-1,28,28,1])
testX = testX.reshape([-1,28,28,1])
def residual_shrinkage_block(incoming, nb_blocks, out_channels, downsample=False,
downsample_strides=2, activation=‘relu‘, batch_norm=True,
bias=True, weights_init=‘variance_scaling‘,
bias_init=‘zeros‘, regularizer=‘L2‘, weight_decay=0.0001,
trainable=True, restore=True, reuse=False, scope=None,
name="ResidualBlock"):
# residual shrinkage blocks with channel-wise thresholds
residual = incoming
in_channels = incoming.get_shape().as_list()[-1]
# Variable Scope fix for older TF
try:
vscope = tf.variable_scope(scope, default_name=name, values=[incoming],
reuse=reuse)
except Exception:
vscope = tf.variable_op_scope([incoming], scope, name, reuse=reuse)
with vscope as scope:
name = scope.name #TODO
for i in range(nb_blocks):
identity = residual
if not downsample:
downsample_strides = 1
if batch_norm:
residual = tflearn.batch_normalization(residual)
residual = tflearn.activation(residual, activation)
residual = conv_2d(residual, out_channels, 3,
downsample_strides, ‘same‘, ‘linear‘,
bias, weights_init, bias_init,
regularizer, weight_decay, trainable,
restore)
if batch_norm:
residual = tflearn.batch_normalization(residual)
residual = tflearn.activation(residual, activation)
residual = conv_2d(residual, out_channels, 3, 1, ‘same‘,
‘linear‘, bias, weights_init,
bias_init, regularizer, weight_decay,
trainable, restore)
# get thresholds and apply thresholding
abs_mean = tf.reduce_mean(tf.reduce_mean(tf.abs(residual),axis=2,keep_dims=True),axis=1,keep_dims=True)
scales = tflearn.fully_connected(abs_mean, out_channels//4, activation=‘linear‘,regularizer=‘L2‘,weight_decay=0.0001,weights_init=‘variance_scaling‘)
scales = tflearn.batch_normalization(scales)
scales = tflearn.activation(scales, ‘relu‘)
scales = tflearn.fully_connected(scales, out_channels, activation=‘linear‘,regularizer=‘L2‘,weight_decay=0.0001,weights_init=‘variance_scaling‘)
scales = tf.expand_dims(tf.expand_dims(scales,axis=1),axis=1)
thres = tf.multiply(abs_mean,tflearn.activations.sigmoid(scales))
residual = tf.multiply(tf.sign(residual), tf.maximum(tf.abs(residual)-thres,0))
# Downsampling
if downsample_strides > 1:
identity = tflearn.avg_pool_2d(identity, 1,
downsample_strides)
# Projection to new dimension
if in_channels != out_channels:
if (out_channels - in_channels) % 2 == 0:
ch = (out_channels - in_channels)//2
identity = tf.pad(identity,
[[0, 0], [0, 0], [0, 0], [ch, ch]])
else:
ch = (out_channels - in_channels)//2
identity = tf.pad(identity,
[[0, 0], [0, 0], [0, 0], [ch, ch+1]])
in_channels = out_channels
residual = residual + identity
return residual
# Real-time data preprocessing
img_prep = tflearn.ImagePreprocessing()
img_prep.add_featurewise_zero_center(per_channel=True)
# Building A Deep Residual Shrinkage Network
net = tflearn.input_data(shape=[None, 28, 28, 1])
net = tflearn.conv_2d(net, 8, 3, regularizer=‘L2‘, weight_decay=0.0001)
net = residual_shrinkage_block(net, 1, 8, downsample=True)
net = tflearn.batch_normalization(net)
net = tflearn.activation(net, ‘relu‘)
net = tflearn.global_avg_pool(net)
# Regression
net = tflearn.fully_connected(net, 10, activation=‘softmax‘)
mom = tflearn.Momentum(0.1, lr_decay=0.1, decay_step=40000, staircase=True)
net = tflearn.regression(net, optimizer=mom, loss=‘categorical_crossentropy‘)
# Training
model = tflearn.DNN(net, checkpoint_path=‘model_mnist‘,
max_checkpoints=10, tensorboard_verbose=0,
clip_gradients=0.)
model.fit(X, Y, n_epoch=200, snapshot_epoch=False, snapshot_step=500,
show_metric=True, batch_size=100, shuffle=True, run_id=‘model_mnist‘)
training_acc = model.evaluate(X, Y)[0]
validation_acc = model.evaluate(testX, testY)[0]
接下来是深度残差网络ResNet的程序:
#!/usr/bin/env python3
# -*- coding: utf-8 -*-
"""
Created on Thu Dec 26 07:46:00 2019
Implemented using TensorFlow 1.0 and TFLearn 0.3.2
K. He, X. Zhang, S. Ren, J. Sun, Deep Residual Learning for Image Recognition, CVPR, 2016.
@author: me
"""
import tflearn
# Data loading
from tflearn.datasets import mnist
X, Y, testX, testY = mnist.load_data(one_hot=True)
X = X.reshape([-1,28,28,1])
testX = testX.reshape([-1,28,28,1])
# Real-time data preprocessing
img_prep = tflearn.ImagePreprocessing()
img_prep.add_featurewise_zero_center(per_channel=True)
# Building a deep residual network
net = tflearn.input_data(shape=[None, 28, 28, 1])
net = tflearn.conv_2d(net, 8, 3, regularizer=‘L2‘, weight_decay=0.0001)
net = tflearn.residual_block(net, 1, 8, downsample=True)
net = tflearn.batch_normalization(net)
net = tflearn.activation(net, ‘relu‘)
net = tflearn.global_avg_pool(net)
# Regression
net = tflearn.fully_connected(net, 10, activation=‘softmax‘)
mom = tflearn.Momentum(0.1, lr_decay=0.1, decay_step=40000, staircase=True)
net = tflearn.regression(net, optimizer=mom, loss=‘categorical_crossentropy‘)
# Training
model = tflearn.DNN(net, checkpoint_path=‘model_mnist‘,
max_checkpoints=10, tensorboard_verbose=0,
clip_gradients=0.)
model.fit(X, Y, n_epoch=200, snapshot_epoch=False, snapshot_step=500,
show_metric=True, batch_size=100, shuffle=True, run_id=‘model_mnist‘)
training_acc = model.evaluate(X, Y)[0]
validation_acc = model.evaluate(testX, testY)[0]
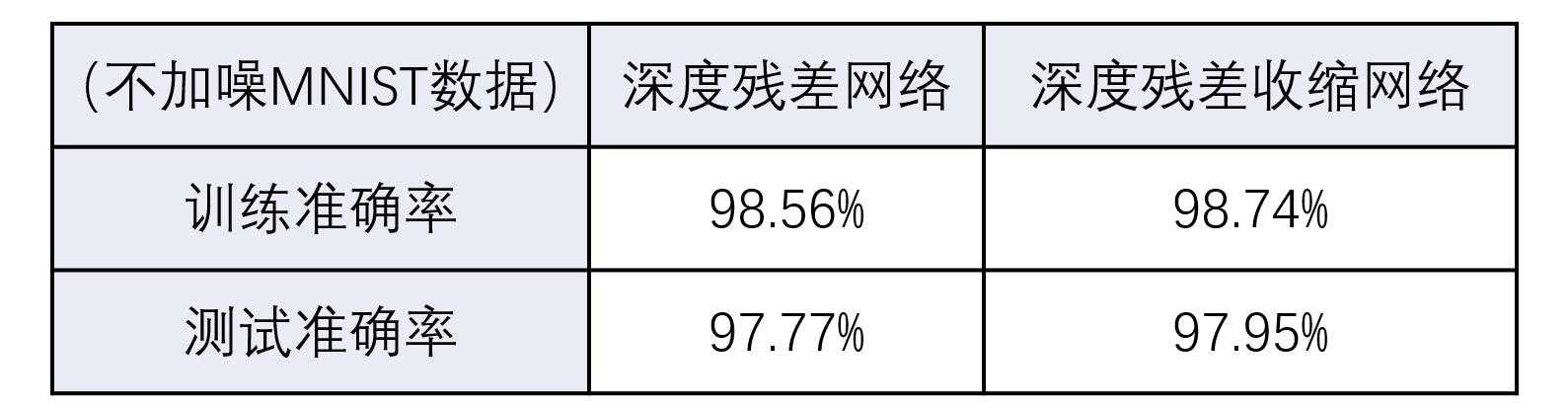
上述两个程序构建了只有1个基本模块的小型网络,MNIST数据集中没有添加噪声。准确率如下表所示(每次运行结果会有些波动),可以看到,即使是对于不含噪声的数据,深度残差收缩网络的结果也是挺不错的:
参考文献:
M. Zhao, S. Zhong, X. Fu, et al., Deep residual shrinkage networks for fault diagnosis, IEEE Transactions on Industrial Informatics, 2019, DOI: 10.1109/TII.2019.2943898
https://ieeexplore.ieee.org/document/8850096
标签:sig inpu img holding batch turn imu datasets 模块
原文地址:https://www.cnblogs.com/yc-9527/p/12113173.html