标签:未来 边缘计算 命令 处理 云端 无线 tps 距离 为什么
-------从单车智能到车路协同-------
其实车路协同并不是一个新概念,早在上世纪90年代,美日欧等国就已经开始这方面的探索,而在我国,也早在2011年就由科技部在863项目中设立了“智能车路协同关键技术研究”主题项目,该项目由清华大学牵头,十余所高校和企业参与,并于2014年结项,奠定了我国车路协同技术的基础。既然车路协同的概念已经出来这么久了,为什么之前一直不温不火呢?因为车路协同涉及的范围实在太大了。车路协同是车、路、人之间的互联互通与数据共享,其涉及的领域包括但不限于车辆制造商、通信运营商、交通设备制造商、道路建设管理部门,以及软件提供商。因此,比起单车智能,车路协同的门槛要高得多,各大产业巨头都选择在经过了好几年的积累后,这两年正式宣布入场。
-------车路协同,不只是车和路-------
车路协同,从字面上来理解,就是车和路进行数据交换,然后双方基于交换数据进行驾驶行为/交通决策的判断。但若将这个过程展开来看,实际上会更加复杂一些。
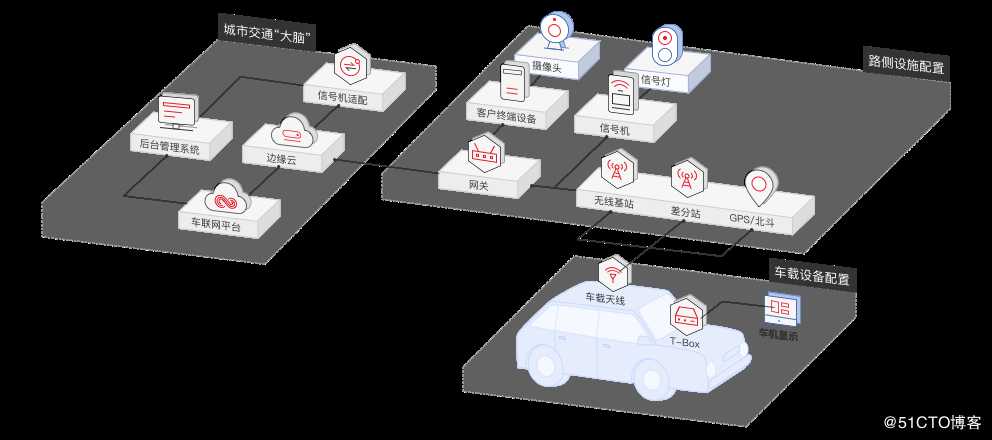
在车路协同中,车自然是指车辆,更准确的说,是指搭载了具有通信能力的智能系统(T-Box)的车辆,这个系统可综合车载传感器收集的信息和路侧传递的信息进行智能演算,给车辆驾驶者提供有用的信息和建议,或者更进一步,直接基于演算结果自动驾驶。但在这个场景中,“路”又是指什么呢?在现代车路协同解决方案中,“路”一般是指路侧智能化设备的集合,包括用于收集路况信息的传感设备,如摄像头、雷达等;用于显示交通诱导/控制信息的显示设备,如信号灯、信息屏等;用于和车辆通信的通讯设备,如无线基站、网关;以及其核心,用于汇总信息进行计算以及给各类设备下发命令的智能计算系统。
道路交通是个很复杂的场景,其中既存在需要根据实时局部信息进行快速判断,并返回结果的场景,如危险路况避让、交通事故预警,也存在需要收集全局信息进行汇总分析,俯瞰大局的场景,例如交通态势分析,道路限行控制。读过我们前一篇博文的读者是不是觉得这个场景很熟悉?没错,这正是边缘计算的应用场景。一个理想的车路协同系统应该基于边云协同架构,边缘节点和各种路侧设备共杆部署,及时获取路况信息,进行初步分析与演算,紧急事件直接下发给车/路设备,及时处理;全局数据(包括已下发的事件)经过清洗后上报给云端,云端进一步演算后判断是否需要追加下发事件,并支持通过大屏进行整体交通态势的展示和由用户进行事件管理与控制。
------车路协同带来的全新交通体验-------
要解释清楚车和路、边和云到底如何协同,只讲概念是不够的,接下来让我们几个具体的交通场景入手,来看下车路协同到底是怎么运作的,以及它会怎么改变我们的交通体验。
---交通事故预警---
道路上发生交通事故后,周边车辆往往要接近到目视可见范围才能确认事故的发生地点,若事故发生在弯道或隧道处,周边车辆可能会因为反应不及而引发二次事故,造成更大的损失。

车路协同系统可通过车辆自行上报、实时视频和毫米波雷达等多种手段实时获取到交通事故的信息,并下发给周边的车辆进行预警,车辆提前进行减速和避让,避免二次事故的发生。在这个场景中,交通事故情况的初步判断及预警事件的下发都可以由边缘侧独立完成,从事故发生到预警下发之间可达到仅有秒级延迟,留给车侧足够的反应时间。同时,这个事件也会上报给云端进行统计和显示,便于交通指挥人员掌握事故情况。
---恶劣天气预警---
恶劣天气,如暴雨、大雪、浓雾、横风等对车辆驾驶影响很大,若车辆正常行驶中遇到突发恶劣天气,可能会因为反应不及而造成交通事故。

为解决这种问题,车路协同系统可以在路侧部署气象传感器,监测如温度、湿度、风力、风速等天气信息,边缘节点汇总后上报给云端,云端结合从国家气象系统获取的信息进行分析,及时发现甚至预测突发恶劣天气,并对恶劣天气影响范围内的车辆进行预警,让司机提前做好准备,降低事故发生率。在这个场景中,边缘能获取的信息有限,需要云端基于完整的信息进行分析和判断,提高事件预警的准确率。
---弱势交通参与者预警---
车辆行驶至路口时都需要减速,防止与弱势交通参与者(行人/自行车等)发生碰撞,造成严重的交通事故,但由于视觉盲区或者弱势交通参与者不遵守交通规则等原因,事故仍然常常发生。

但有了车路协同系统之后,路侧可以通过实时视频和毫米波雷达监控路口,边缘节点计算弱势交通参与者的实时位置,结合信号灯状态,将人行道红灯时位于车道或者非常靠近车道的弱势交通参与者信息发送给即将经过路口的车辆,起到提前预警的作用;并且边缘可以将初步分析后的数据上报至云端,云端根据数据预测弱势交通参与者的行动轨迹,将离路口有一定距离但正在接近路口的弱势交通参与者的信息也追加发送给车辆,进一步降低了事故发生的可能性。在这个场景中,边缘处理需要快速响应的事件,云端处理计算量大的数据,边云协同最大化数据利用率。
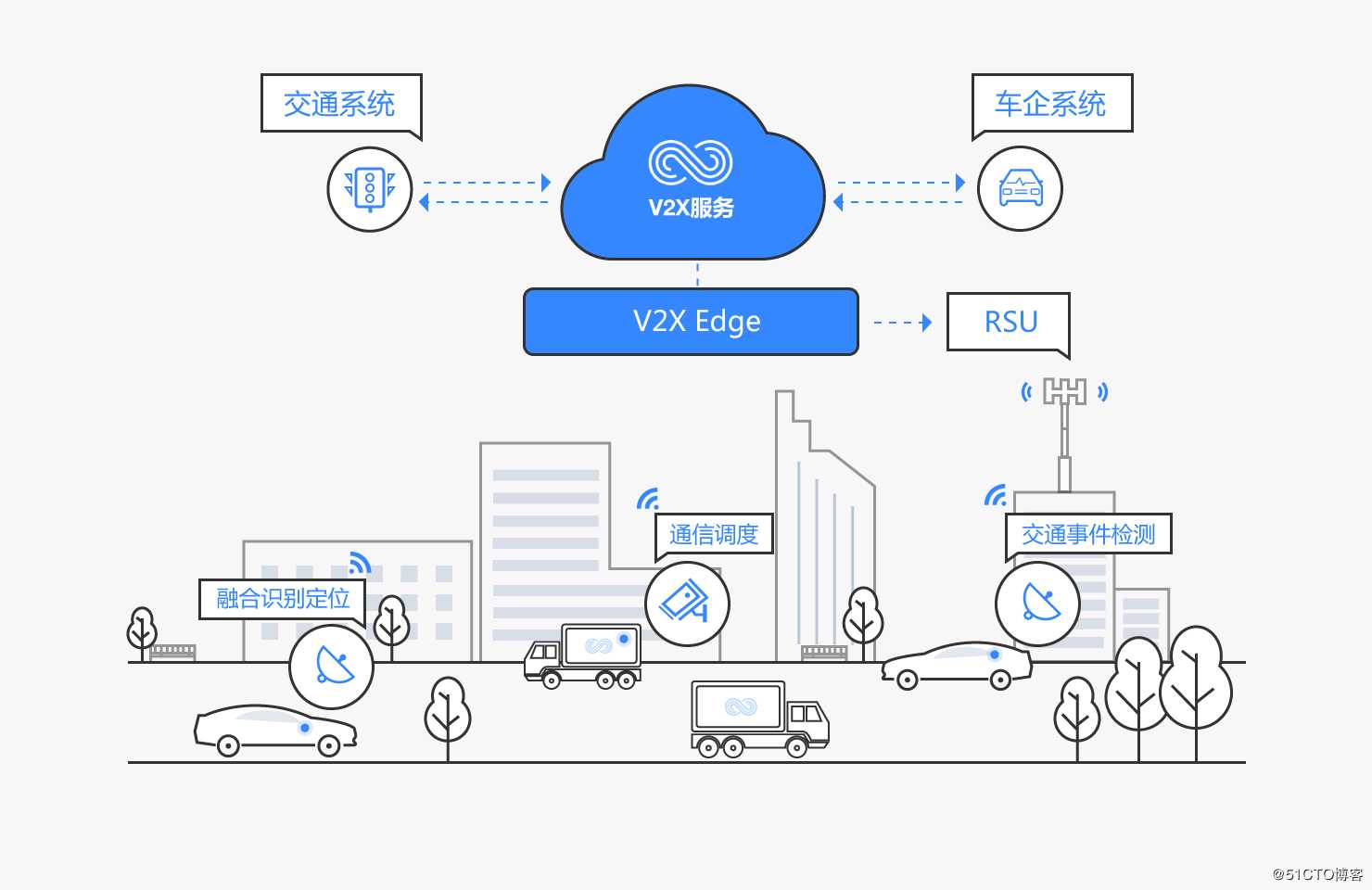
通过以上三个场景,我们介绍了车路协同系统的基本原理,以及边和云的分工。但在实际应用中,由于车路协同系统的复杂性,边与云可能由不同厂家提供服务,仅能进行最基础的协作,无法发挥车路协同系统的最大价值。针对这种情况,华为云IoT推出了“V2X车路协同解决方案”,包含边缘侧的“V2X Egde”和云端的“V2X Server”,两者无间协作,最大化车路协同的价值,为未来智慧交通的实现添砖加瓦。
关于华为物联网可参加学习免费课程视>>>>>《IoT七天开发训练营》或联系华为IoT小助手(微信号:huawei-iot)获取更多课程。
标签:未来 边缘计算 命令 处理 云端 无线 tps 距离 为什么
原文地址:https://blog.51cto.com/14630103/2462688