标签:delay 原来 标记 nta target 未来 除了 虚拟 添加
翻译并总结官方文档,添加自定义示例,参考自Docker 19.03版本官方文档
未来可能归档为:https://docs.docker.com/v19.03/
2020.01.03为https://docs.docker.com/engine/swarm/
本文主要演示创建一个小规模的Swarm集群,包含一个管理节点与两个工作节点,概念可以参考https://www.cnblogs.com/hellxz/p/12134386.html
Docker Machine安装参考我的上一篇文章,安装Docker Machine
实体机安装Linux或Mac,跳过此节
本文通过一台Linux虚拟机中创建三个虚拟机节点来操作的,虚拟机内存可以开大些,另外需要配置开启Intel VT-x/EPT或AMD-RVI(V)
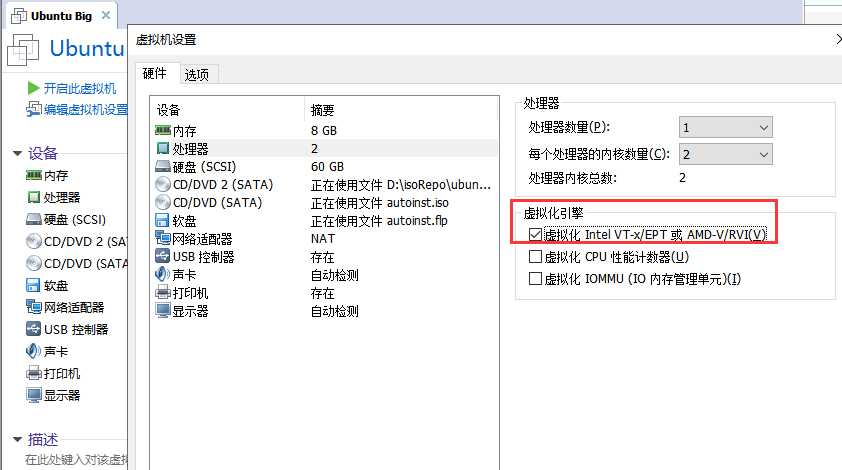
另外,由于我们要做的实验是在虚拟机下的再创建虚拟机,外部虚拟机与虚拟机内构成内网,在没有设置代理的情况下,我们无法直接通过浏览器直接访问
创建一个管理节点的虚拟机
$ docker-machine create -d virtualbox manager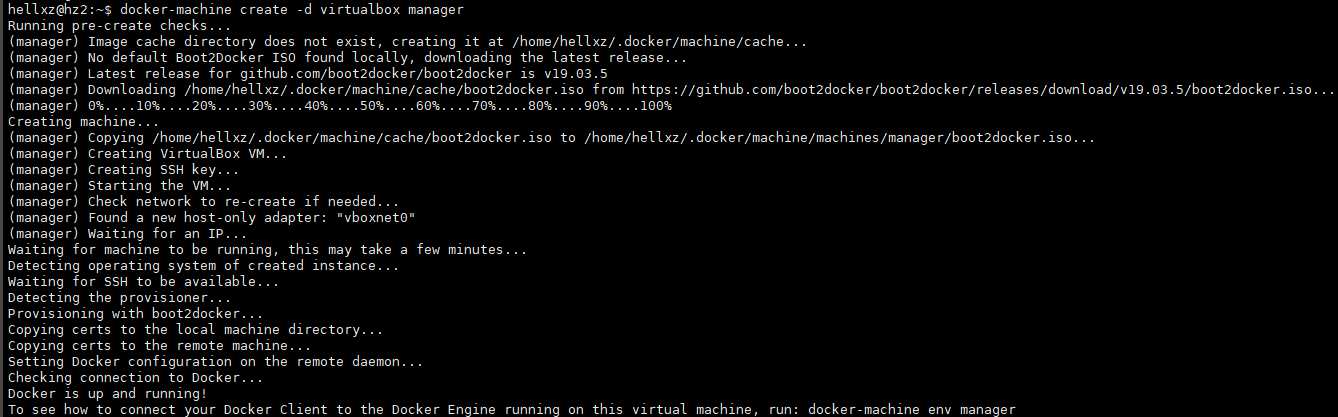
连接创建的管理节点虚拟机
$ docker-machine ssh manager1
出现上图已经进入虚拟机了
初始化Swarm集群
$ docker swarm init --advertise-addr 192.168.99.100
初始化完成,在多网卡的情况下,必须使用--advertise-addr指定IP,其它主机必须可以访问此ip,输出中包含新节点加入此节点的命令,我们只需要复制此命令到其它节点上执行
执行
docker swarm init的节点自动成为管理节点,节点的ip是ssh到节点后ifconfig查到的添加节点命令要先复制出来,一会添加节点会用,如果没复制也不要紧
在manager节点输入docker swarm join-token 角色 就能提示token了,上边复制的默认是worker角色的命令
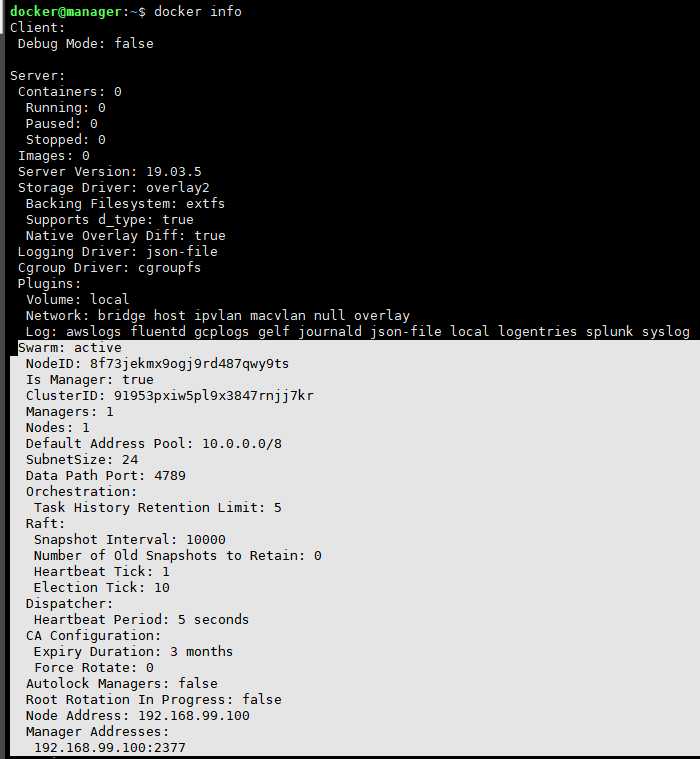
输入docker info查看当前节点的Docker Swarm Mode已经处于激活状态了
执行docker node ls查看当前Swarm集群中节点的情况

*指示当前登录的节点
输出exit退出当前登录的主机
创建第一个工作节点并ssh连接到这个节点上
$ docker-machine create -d virtualbox worker1
$ docker-machine ssh worker1
执行刚才复制的docker swarm join-token命令,忘了就先去manager节点下执行docker swarm join-token worker来查看命令
$ docker swarm join --token SWMTKN-1-0kr7tkx9ku4rcrl1lny1o8chg9xl24h4nexmz1ctfwz43425uq-egecegeyfaet0volcvo15zia8 192.168.99.100:2377
This node joined a swarm as a worker.接着创建个worker2,操作不再复述了
连接manager节点,执行命令查看集群状态
$ docker node ls
docker node ls命令仅可以在管理节点使用
部署服务只需要使用docker service create加正常的docker命令,还可以指定创建几个备份实例,这里部署2个Nginx
$ docker service create --replicas 2 --name nginx -p 80:80 nginx:mainline-alpine
docker service create命令主要参数:
--name- 用来指定服务名,部署服务的容器名使用这个名称作为前缀--replicas- 设置负载实例数其余参数请自行参考
docker service create --help文档此命名仅能在manager节点执行
在Docker Swarm Mode简介与核心概念 一文中,我们有谈过:服务可以运行在Manager节点上,也可以运行在Worker节点上
部署服务的输出并没有提示具体将服务部署到哪个节点上,接下来我们看看节点情况
使用docker service ls查看服务列表,查看具体服务部署在哪个节点使用docker service ps 服务名

如图,我们的服务一个部署到了manger节点上,一个部署在worker1节点上
通过docker service inspect命令检查服务的详细信息,使用--pretty使输出更易读
$ docker service inspect --pretty nginx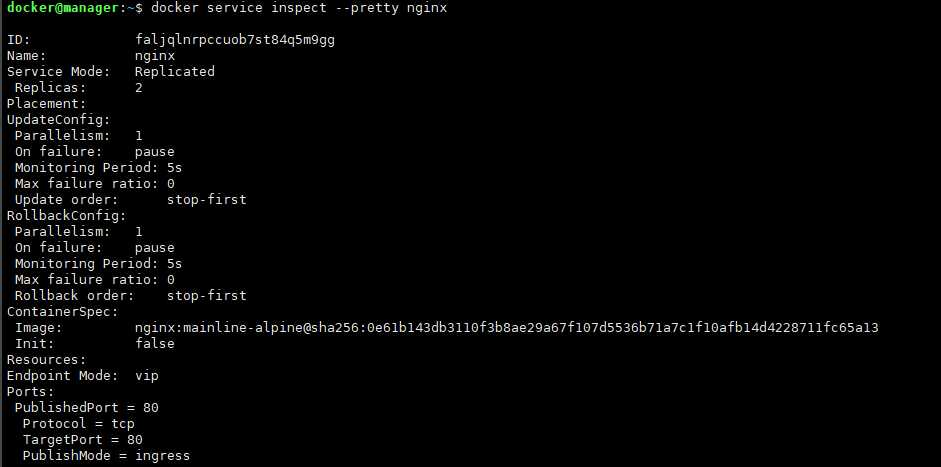
除了这种简单的方法外就是普通的办法——去部署的节点上docker ps ??
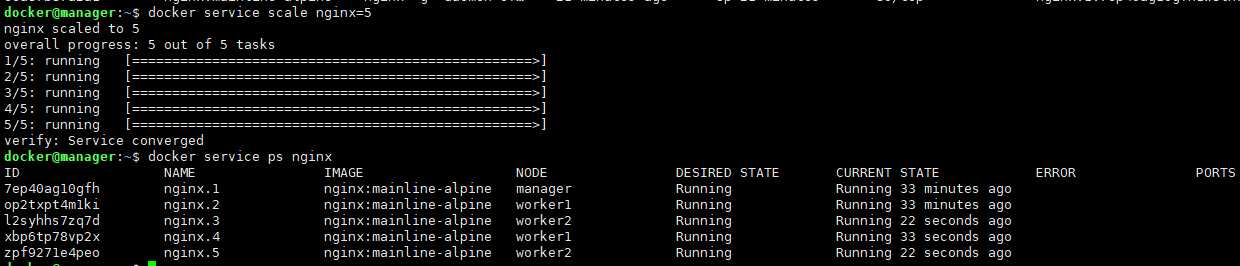
使用docker service scale命令来对服务进行扩大或缩小实例数
当业务压力攀升时,我们需要对服务进行横向扩容,添加更多的实例,就可以像下边这么做
$ docker service scale nginx=5
=左边是服务名,右边是负载数
业务压力下降时只需调小负载数的值
使用docker service rm命名来删除服务,包含服务包含的所有Task都会被删除
$ docker service rm nginx
一般升级服务的方式是停服再启动新的服务这种方式,有些人习惯将原服务删除,再部署新的,当新的服务有问题,想回退上一版本时就傻眼了
在Docker部署服务的情况下,我们可以自己手动docker stop容器再创建新的部署新的容器,这样虽然看起来没问题,但是手动操作一方面是很大重复劳动,另一方面人工也容易误操作
在这种情况下,Docker Swarm为我们准备了docker service update命令来更新服务,一方面简单更新操作,另一方面提供回滚的命令,这个稍后会提及
关于服务更新的配置有两种:
- 一种是在初次部署服务时就指定的配置,比如在
docker service create时添加参数--update-delay+时延来设置每个服务的Task间的延迟,--update-parallelism设置更新时最大并行部署数值,--update-failure-action标记更新失败要做的动作 等- 另一种就是
docker service update时指定参数,上边举例的三个参数此命令也可以使用以上提到的参数在例子中就不写了
刚才已经把nginx的服务干掉了,我们再创建部署一个nginx服务
$ docker service create --replicas 2 --name nginx -p 80:80 nginx:mainline-alpine查看下当前服务镜像,一会我们通过命令修改镜像版本
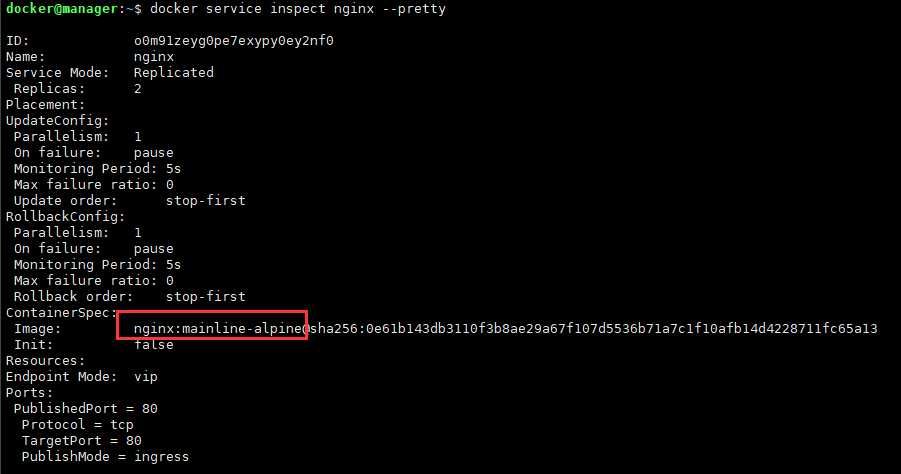
我们更新下nginx服务的镜像版本,格式为docker service update --image 镜像 服务名
$ docker service update --image nginx:alpine nginx
再查看下nginx服务
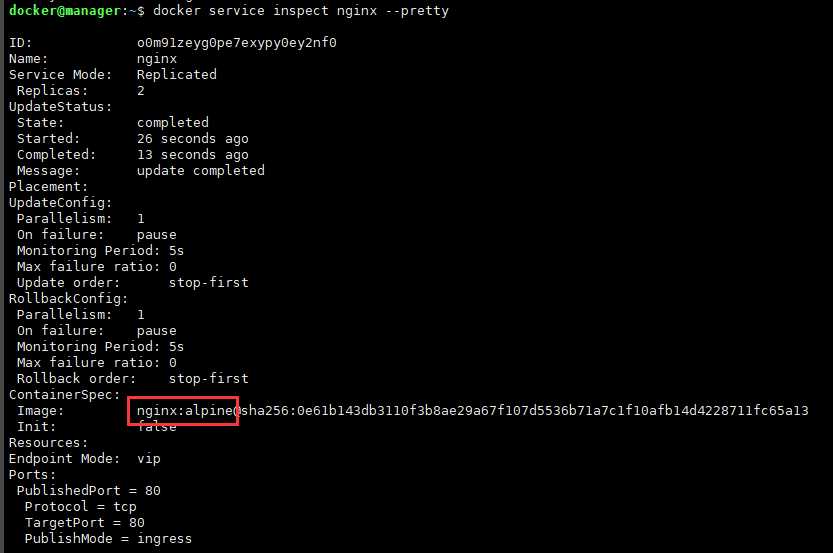
我们发现镜像的版本已经改变了
使用docker service ps nginx查看服务情况

我们发现之前版本的Task还有保留,只是状态为Shutdown
保留的Task可以用于后续如果服务不正常,回滚版本
docker service update更多操作请参考--help文档
使用docker service rollback命令对服务进行一键回退
$ docker service rollback nginx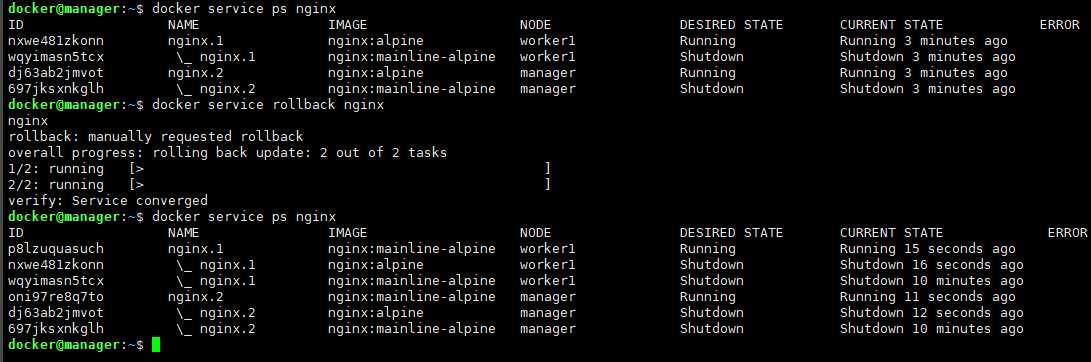
回退成功,如上图我还执行的查看服务命令,发现之前升级与回退的版本都还在,层次也比较清晰
当我们部署服务的时候,Manager节点会将Task分发到所有状态为ACTIVE的节点上,执行Task
当需要维护一个节点的时候,你一定不会希望还有Task被分配到此节点上,Swarm的设计者也考虑到这点,除了ACTIVE状态外,还有一个DRAIN 状态用来标识当前节点(Node)不再提供服务,你也别给我这发Task了
使用docker node update --availability drain 节点名来完成此功能
$ docker node update --availability drain worker1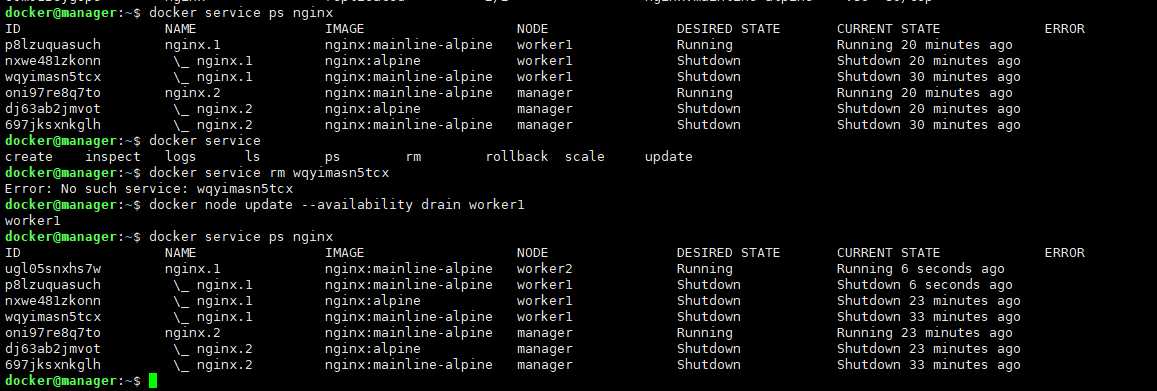
上图先是查看了当前nginx服务部署在worker1与manager节点上,接着下线了worker1
我们发现Manger将原来部署在worker1的节点下线,重新在worker2节点上部署了nginx的task
可能上图中对node的状态描述不直观,执行docker node ls或许更清楚些??

上线与之相反,设置drain为active即可,docker node update --availability active 节点名
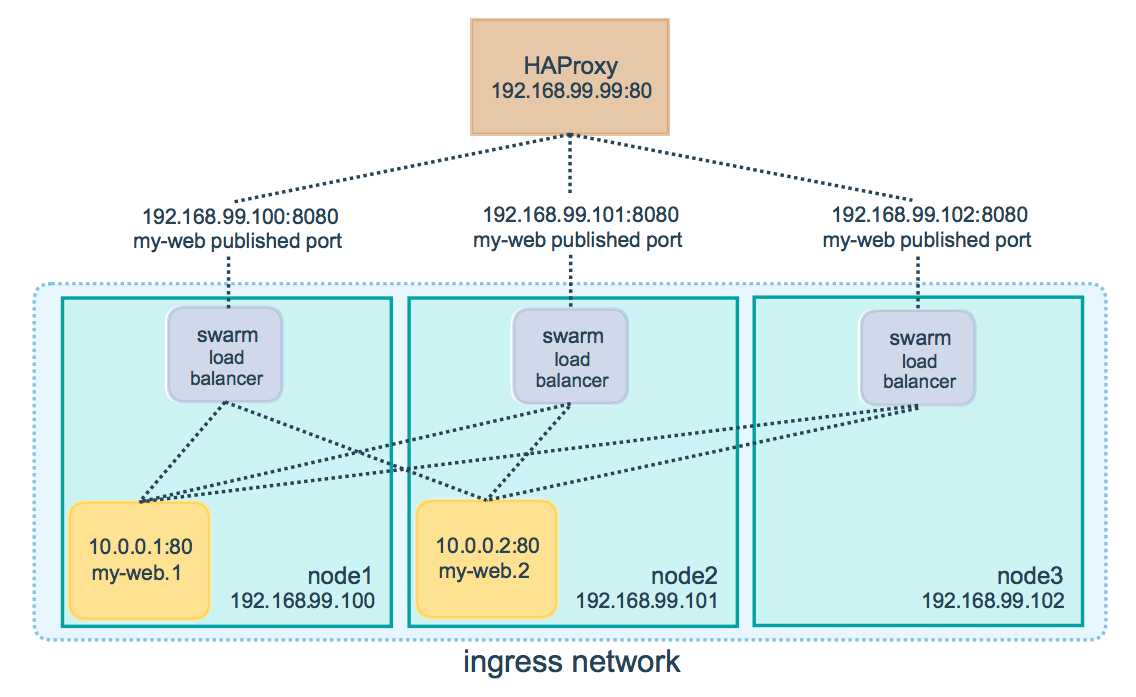
简单来说是使用Swarm模式的网络路由,将服务指定端口暴露出去提供服务
有点类似于
-p 8080:80这种写法,按官网的说法是:分隔的写法是旧版本的写法?? ,因为新版本更灵活易读
看了下文档,把我认为最关键的先抛出来
Swarm中暴露接口有两种情况,一种是创建服务时暴露,另一种是服务已经存在,需要暴露
创建服务时暴露端口
$ docker service create --name <SERVICE-NAME> --publish published=<PUBLISHED-PORT>,target=<CONTAINER-PORT> <IMAGE>更新服务时暴露接口
$ docker service update --publish-add published=<PUBLISHED-PORT>,target=<CONTAINER-PORT> <IMAGE>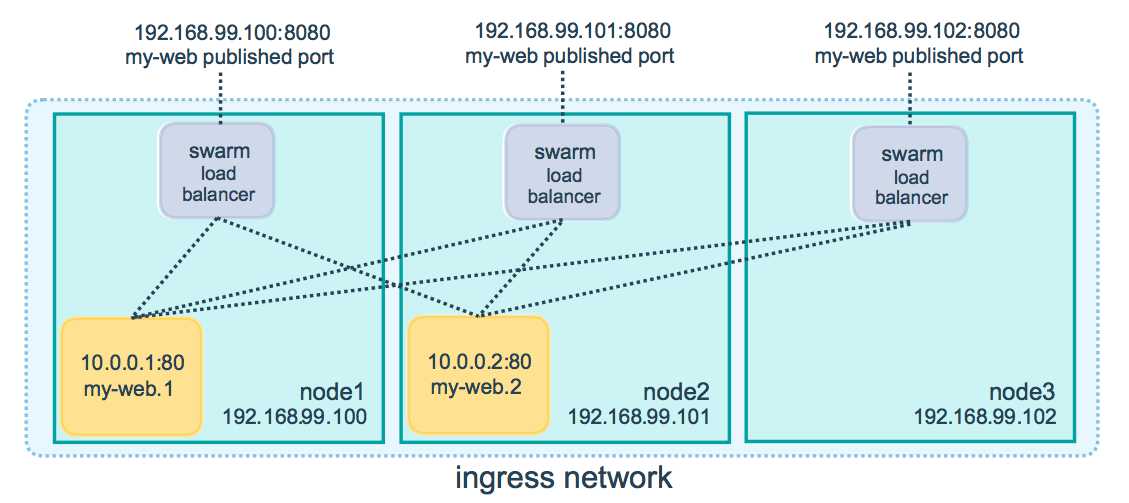
官方文档这块没看明白,大意是使用节点的host模式网络绕过路由网格
$ docker service create --name dns-cache --publish published=53,target=53,protocol=udp,mode=host --mode global dns-cacheTODO: 待完善,如您有清晰的概念,还请留言解惑,在此先行感谢
相信我贴一张图就明白了,就是配置个负载均衡配置到Node节点的特定端口上,此端口相对于容器暴露的端口作映射
本文是官网翻译文档,如有错误与不准确处,希望读者可以留言与本人探讨
标签:delay 原来 标记 nta target 未来 除了 虚拟 添加
原文地址:https://www.cnblogs.com/hellxz/p/docker_swarm_get_start.html
