标签:ORC HAL库 统一 ctrl ret 驱动程序 int 模块 访问
阅读附件中的代码,回答:
#if defined(STM32F205xx)
#include "stm32f205xx.h"
#elif defined(STM32F215xx)
#include "stm32f215xx.h"
#elif defined(STM32F207xx)
#include "stm32f207xx.h"
#elif defined(STM32F217xx)
#include "stm32f217xx.h"
#else
#error "Please select first the target STM32F2xx device used in your application (in stm32f2xx.h file)"
#endifstm32f2xx_hal.h:stm32f2xx_hal.c/h 主要实现HAL库的初始化、系统滴答相关函数、及CPU的调试模式配置
stm32f2xx_hal_conf.h :该文件是一个用户级别的配置文件,用来实现对HAL库的裁剪,其位于用户文件目录,不要放在库目录中。库文件:
stm32f2xx_hal_ppp.c/.h // 主要的外设或者模块的驱动源文件,包含了该外设的通用API
stm32f2xx_hal_ppp_ex.c/.h // 外围设备或模块驱动程序的扩展文件。这组文件中包含特定型号或者系列的芯片的特殊API。以及如果该特定的芯片内部有不同的实现方式,则该文件中的特殊API将覆盖_ppp中的通用API。
stm32f2xx_hal.c/.h // 此文件用于HAL初始化,并且包含DBGMCU、重映射和基于systick的时间延迟等相关的API
其他库文件
用户级别文件:
stm32f2xx_hal_msp_template.c // 只有.c没有.h。它包含用户应用程序中使用的外设的MSP初始化和反初始化(主程序和回调函数)。使用者复制到自己目录下使用模板。
stm32f2xx_hal_conf_template.h // 用户级别的库配置文件模板。使用者复制到自己目录下使用
system_stm32f2xx.c // 此文件主要包含SystemInit()函数,该函数在刚复位及跳到main之前的启动过程中被调用。 **它不在启动时配置系统时钟(与标准库相反)**。 时钟的配置在用户文件中使用HAL API来完成。
startup_stm32f2xx.s // 芯片启动文件,主要包含堆栈定义,终端向量表等
stm32f2xx_it.c/.h // 中断处理函数的相关实现
main.c/.h //HAL_StatusTypeDef HAL_ADC_Start(ADC_HandleTypeDef* hadc);
HAL_StatusTypeDef HAL_ADC_Stop(ADC_HandleTypeDef* hadc);
HAL_StatusTypeDef HAL_ADC_Start_IT(ADC_HandleTypeDef* hadc);
HAL_StatusTypeDef HAL_ADC_Stop_IT(ADC_HandleTypeDef* hadc);
HAL_StatusTypeDef HAL_ADC_Start_DMA(ADC_HandleTypeDef* hadc, uint32_t* pData, uint32_t Length);
HAL_StatusTypeDef HAL_ADC_Stop_DMA(ADC_HandleTypeDef* hadc);#### 三大回调函数
在HAL库的源码中,到处可见一些以__weak开头的函数,而且这些函数,有些已经被实现了,比如:
__weak HAL_StatusTypeDef HAL_InitTick(uint32_t TickPriority)
{
/*Configure the SysTick to have interrupt in 1ms time basis*/
HAL_SYSTICK_Config(SystemCoreClock/1000U);
/*Configure the SysTick IRQ priority */
HAL_NVIC_SetPriority(SysTick_IRQn, TickPriority ,0U);
/* Return function status */
return HAL_OK;
}所有带有__weak关键字的函数表示,就可以有用户自己来实现,如果,外部反现了同名函数,且不带__weak关键字,那么连接器就会采用外部实现的同名函数。HAL库包含如下三种用户回调函数(PPP为外设名):
ucos的任务切换方式一般有两种:
时钟节拍中断服务函数OSTickISR()进行切换。
任务中调用时间延迟函数OSTimeDly()进行切换。
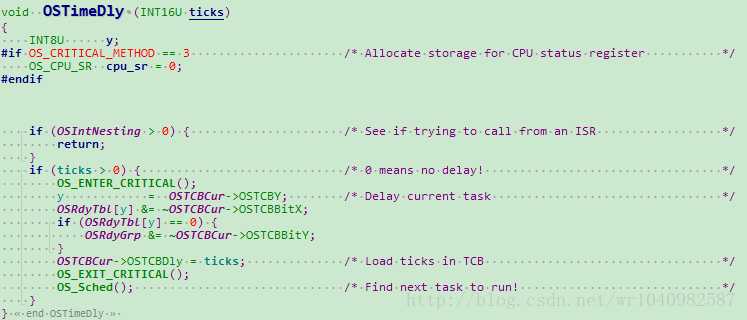
y = OSTCBCur->OSTCBY;
OSRdyTbl[y] &= ~OSTCBCur->OSTCBBitX;//清除准备优先级中的X标记量
if (OSRdyTbl[y] == 0) {
OSRdyGrp &= ~OSTCBCur->OSTCBBitY;//如果对应的Y优先级中没有X的优先级标记了,则把Y优先级也清除
}
OSTCBCur->OSTCBDly = ticks;//把对应的延时时间赋值给任务控制块,在系统滴答中断中会自动减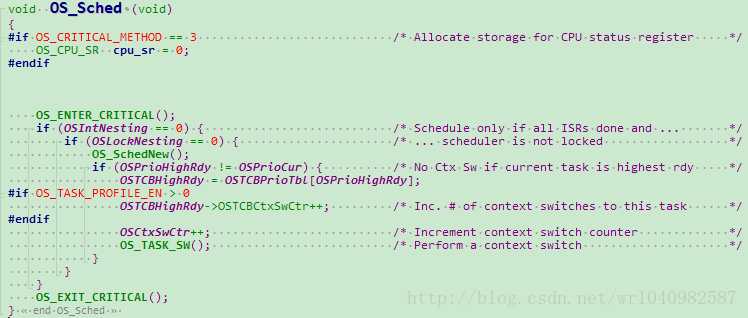
OS_SchedNew();//从准备好的任务中找到优先级最高的,赋值给OSPrioHighRdy,然后通过OSTCBHighRdy = OSTCBPrioTbl[OSPrioHighRdy];从任务的链表中找出对应的任务控制块, OS_TASK_SW();实际切换任务的函数,一般由汇编代码完成。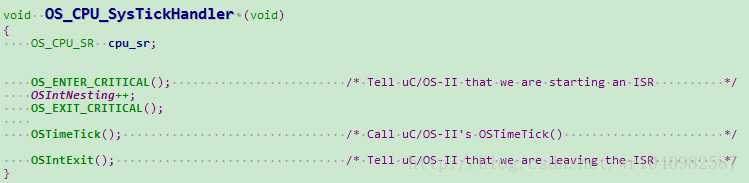
OS_CPU_SysTickHandler (void)位系统滴答中断函数。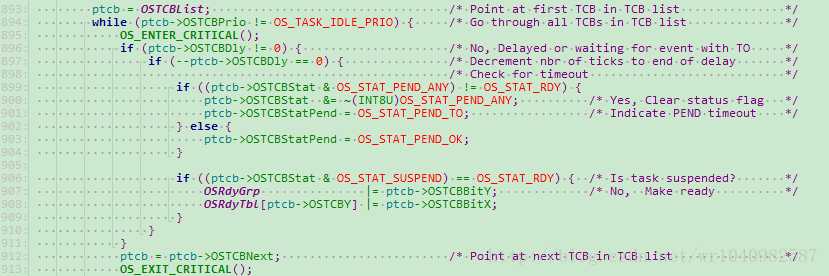
上面内容为OSTimeTick()函数的主要内容,if (ptcb->OSTCBDly != 0) 和 if (--ptcb->OSTCBDly == 0) 判断该任务块中的设定的延时是否到了,OSRdyGrp |= ptcb->OSTCBBitY; OSRdyTbl[ptcb->OSTCBY] |= ptcb->OSTCBBitX;延时时间到后将该任务的优先级重新加入到优先级准备变量中。

标签:ORC HAL库 统一 ctrl ret 驱动程序 int 模块 访问
原文地址:https://www.cnblogs.com/wangzihong0213/p/12150266.html