标签:运算 csdn pen 方法 简介 abs div 像素 atp
简介
sobel算子是图像边缘检测的最重要的算子之一,在机器学习,数字媒体、计算机视觉等领域起着重要作用。本文主要介绍sobel算子的计算过程。python实现过程和python中相关函数的介绍。方便读者实际中使用。
原理
边缘是指在图像上像素灰度变化最显著的地方,边缘检测算子则利用图像边缘灰度的突变来检测边缘。Sobel算子包含两组3X3的滤波器,分别对水平和垂直方向上的边缘敏感。
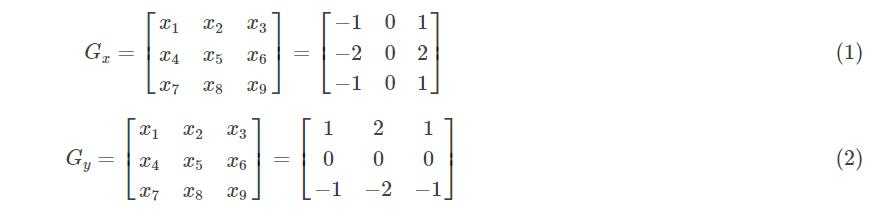
让两个方向模板分别沿着X轴、Y轴与图像做卷积,方向是从上到下和从左到右。将模板的中心和图像上的某个像素重合,并将该像素周围的点与模板上的系数相乘,如(3)和(4)所示,其中G(x)和G(y)分别表示横向及纵向边缘检测的图像梯度值。
G(X) = (X3 + 2X6 + X9)-(X1 + 2X4 + X7)
G(Y) = (X1 +2X2 +X3) - (X7 + 2X8 + X9)
图像上每个像素点的横向及纵向梯度值通过如下公式结合,来计算该点梯度值G的大小:
G = √Gx2+Gy2
为了减少运算时间,提高运算效率,可以使用绝对值求和近似的方法代替开平方:
G = ¦Gx¦ + ¦Gy ¦
最后选取合适的阈值,将像素点的灰度值与阈值进行比较,若大于阈值,则改点为图像的边缘点。由于Sobel算子对于像素的位置影响做了加权,可以降低边缘模糊程度,与Prewitt算子,Roberts相比效果更好。
python实现
sobel算子在python中的实现有两种途径:opencv和skimage。全部代码如下:
from skimage import data,filters,img_as_ubyte import matplotlib.pyplot as plt import cv2 # 图像读取 img = data.camera() plt.imshow(img,plt.cm.gray) ‘‘‘**********skimage*************‘‘‘ # sobel边缘检测 edges = filters.sobel(img) # 浮点型转成uint8型 edges = img_as_ubyte(edges) # 显示图像 plt.figure() plt.imshow(edges,plt.cm.gray) # sobel 水平方向边缘检测 edgesh = filters.sobel_h(img) edgesh = img_as_ubyte(edgesh) plt.figure() plt.imshow(edgesh,plt.cm.gray) # sobel 竖直方向边缘检测 edgesv = filters.sobel_v(img) edgesv = img_as_ubyte(edgesv) plt.figure() plt.imshow(edgesv,plt.cm.gray) ‘‘‘**********opencv*************‘‘‘ # sobel边缘检测 edges = cv2.Sobel(img,cv2.CV_16S,1,1) # 浮点型转成uint8型 edges = cv2.convertScaleAbs(edges) plt.figure() plt.imshow(edges,plt.cm.gray) # sobel 水平方向边缘检测 edges = cv2.Sobel(img,cv2.CV_16S,1,0) edgesh = cv2.convertScaleAbs(edgesh) plt.figure() plt.imshow(edgesh,plt.cm.gray) # sobel 竖直方向边缘检测 edges = cv2.Sobel(img,cv2.CV_16S,0,1) edgesv = cv2.convertScaleAbs(edgesv) plt.figure() plt.imshow(edgesv,plt.cm.gray)
————————————————
原文链接:https://blog.csdn.net/weixin_41500849/article/details/80611263
标签:运算 csdn pen 方法 简介 abs div 像素 atp
原文地址:https://www.cnblogs.com/hujingquan/p/12228246.html