标签:temp efi logic issue ini inline esc 目录 process
目录
In this paper, a simple but effective model for low-light enhancement which has a lightness-aware property is proposed. As model structure shown in \(Fig.1\) and equation defined in \(Eq.1\).
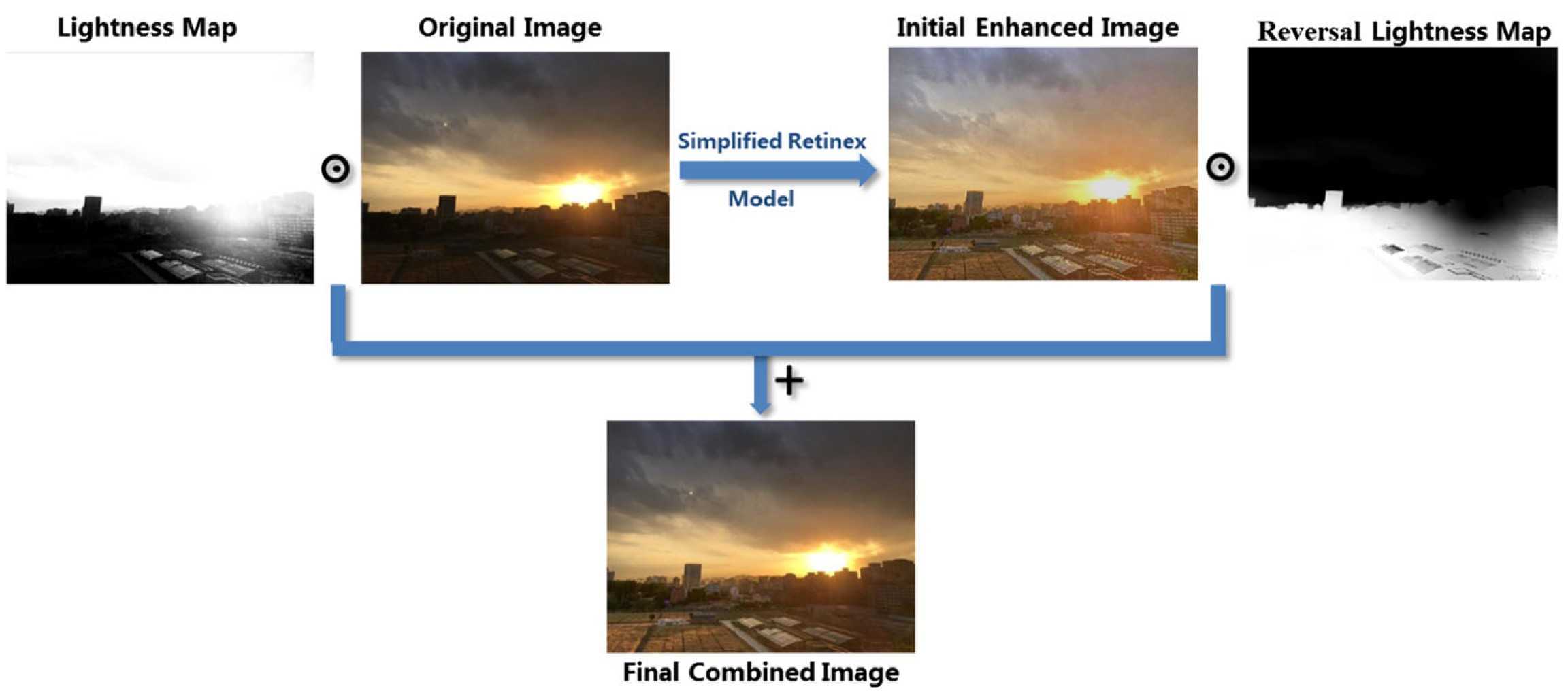
\(Fig.1\) model structure is illustrated.
\[I_0 = L\odot I+ (1 - L) \odot I_E\tag{1}\]
\(Eq.1\) model equational presentation. Where \(I_0\) is model output with the enhancing result of input image \(I\), \(L\) and \(I_e\) are estimated lightness map and initial enhanced result respectively.
After the overall framework is put forward, several unsolved issues are waiting for solutions, such as lightness map estimation and initial enhancing processing. Solutions of the above issues are to be described in the subsections.
1.1 Estimation of lightness map
1.1.1 initial estimation
maximum RGB channel Initial lightness estimation producing process is based on maximum channel of RGB image instead of grayscale image for its value-representative in low lightness condition and structure-representative which is of vital importance in later refine processing.
\[T_0(p) = \max I^c(p)\quad c\in\{R, G, B\}\tag{2}\]
1.1.2 refine initial estimation
lightness mask As a center process in a system with lightness-aware property, the lightness map is of vital importance, refinement is required. We set a threshold to judge whether a pixel is weak-illuminated, function present a perfect performance when setting \(t = 0.2\) which is validated in experiments. Outliers generated in this process can be removed in ==morphological open operation==.
\[L_{B_{temp}}(p) = 1 - (T_0 > t) \tag{3}\]
\[L_B = U\{L_{B_{temp}}\}\tag{4}\]
\(Eq.3, 4\) \((T_0 > t)\) is a bool value which only ranges 0 and 1, \(U\{\}\) is a morphological open operation.
guided filter For the linear function and local operator property of maximum RGB channel method, many small outliers are produced. Guided filter is introduced to solve the artifacts.
\[L_R \larr \sum_jW_{ij}(g)L_B\tag{5}\]
\[W_{ij}(g) = \frac{1}{|\omega|^2}\sum_{k:(i, j)\in\omega_k}(1 + \frac{(g_i - \mu_k)(g_j - \mu_k)}{\sigma_k^2 - \epsilon})\tag{6}\]
\(Eq.4,5\) where \(\omega_k\), \(|\omega|\) are a window centered pixel \(k\) and pixel numbers of windows respectively. \(\mu\) and \(\sigma^2\) are the mean and variance of guided image \(g\) respectively. \(\epsilon\) is a regularization parameter. \(g\) is the maximum channel image \(T_0\).
1.2 Initial enhancing method
Some state-of-art method can be apply to enhanced image generation, such as the LIME1 method/ the LDR method/ the RGF2 method/ the RTV3 method.
puzzles are highlighted in contents.
[1] Guo X, Li Y, Ling H (2017) LIME: low-light image enhancement via illumination map estimation. IEEE Trans Image Process 26(2):982–993
[2] Zhang Q, Shen X, Xu L, Jia J (2014) Rolling guidance filter. Proc Eur Conf Comput Vision (ECCV)
[3] Xu L, Yan Q, Xia Y, Jia J (2013) Structure extraction from texture via relative Total variation. ACM Trans Graph 31(6):Article 139
标签:temp efi logic issue ini inline esc 目录 process
原文地址:https://www.cnblogs.com/litun/p/12231949.html