标签:concat int img 方法 $1 final for ima tar
又一篇3D点云detection的顶会。这篇文章是two stage的方法,非end-to-end。文章的前提是利用faster rcnn得到2D图像的image crop;然后才是本文介绍的PointFusion,即将image crop和对应的3D点云数据作为输入,得到3D box。可以说这篇文章实际2D检测基础上做3D检测。
整个模型如图:
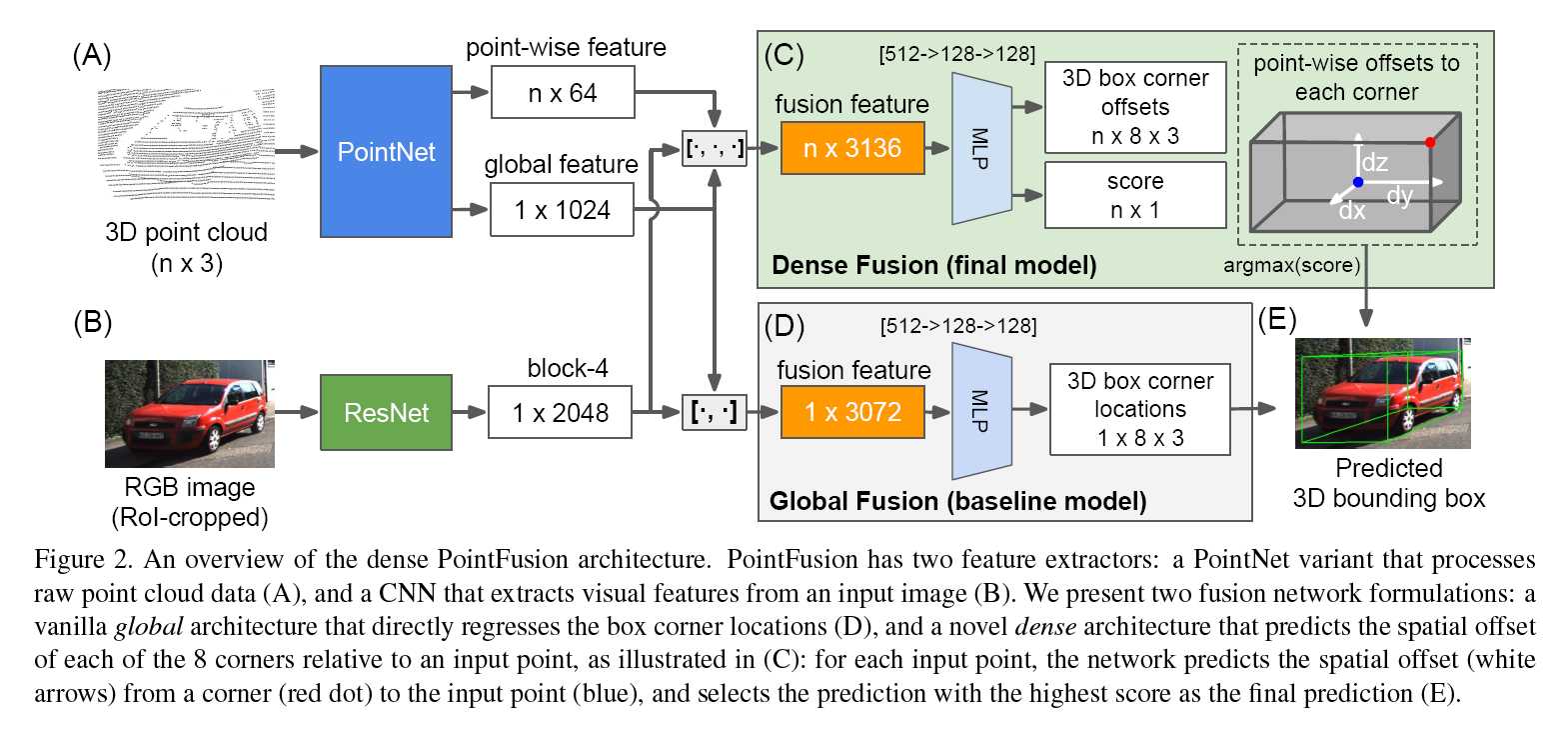
【CVPR2018】PointFusion: Deep Sensor Fusion for 3D Bounding Box Estimation
标签:concat int img 方法 $1 final for ima tar
原文地址:https://www.cnblogs.com/xiaoaoran/p/12233994.html