标签:open parent ogr waitkey 灰度 cst mode process byte
Mat对象:图像文件的内存数据对象
读取图像位Mat对象,获取图像的相关信息
#include <opencv2/opencv.hpp>
#include <iostream>
using namespace cv;
using namespace std;
int main(int argc, char** argv)
{
Mat src = imread("f:/temp/images/lena.jpg", IMREAD_GRAYSCALE);
if (src.empty())
{
printf("Could not find the image!\n");
return -1;
}
namedWindow("002-demo", WINDOW_AUTOSIZE);
imshow("002-demo", src);
// 获取图像的宽度
int width = src.cols;
// 获取图像的高度
int height = src.rows;
// 获取图像的通道数
int dim = src.channels();
int depth = src.depth();
int type = src.type();
if (type == CV_8UC1)
{
printf("type:CV_8UC1\n");
}
// 这里打印出来depth和type有时候为0,并不代表深度为0,而是代表一个枚举类型的值
printf("width: %d, height: %d, dim: %d, depth: %d, type: %d\n", width, height, dim, depth, type);
waitKey(0);
destroyAllWindows();
return 0;
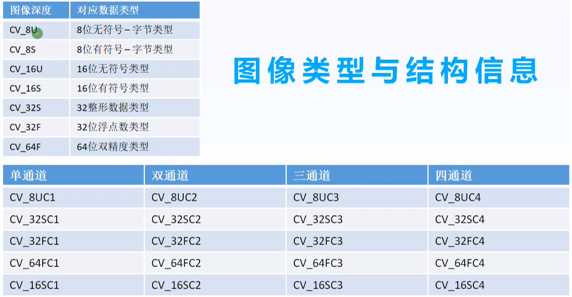
}图像的类型与结构信息:
#ifndef OPENCV_CORE_HAL_INTERFACE_H
#define OPENCV_CORE_HAL_INTERFACE_H
//! @addtogroup core_hal_interface
//! @{
//! @name Return codes
//! @{
#define CV_HAL_ERROR_OK 0
#define CV_HAL_ERROR_NOT_IMPLEMENTED 1
#define CV_HAL_ERROR_UNKNOWN -1
//! @}
#ifdef __cplusplus
#include <cstddef>
#else
#include <stddef.h>
#include <stdbool.h>
#endif
//! @name Data types
//! primitive types
//! - schar - signed 1 byte integer
//! - uchar - unsigned 1 byte integer
//! - short - signed 2 byte integer
//! - ushort - unsigned 2 byte integer
//! - int - signed 4 byte integer
//! - uint - unsigned 4 byte integer
//! - int64 - signed 8 byte integer
//! - uint64 - unsigned 8 byte integer
//! @{
#if !defined _MSC_VER && !defined __BORLANDC__
# if defined __cplusplus && __cplusplus >= 201103L && !defined __APPLE__
# include <cstdint>
# ifdef __NEWLIB__
typedef unsigned int uint;
# else
typedef std::uint32_t uint;
# endif
# else
# include <stdint.h>
typedef uint32_t uint;
# endif
#else
typedef unsigned uint;
#endif
typedef signed char schar;
#ifndef __IPL_H__
typedef unsigned char uchar;
typedef unsigned short ushort;
#endif
#if defined _MSC_VER || defined __BORLANDC__
typedef __int64 int64;
typedef unsigned __int64 uint64;
# define CV_BIG_INT(n) n##I64
# define CV_BIG_UINT(n) n##UI64
#else
typedef int64_t int64;
typedef uint64_t uint64;
# define CV_BIG_INT(n) n##LL
# define CV_BIG_UINT(n) n##ULL
#endif
#define CV_USRTYPE1 (void)"CV_USRTYPE1 support has been dropped in OpenCV 4.0"
#define CV_CN_MAX 512
#define CV_CN_SHIFT 3
#define CV_DEPTH_MAX (1 << CV_CN_SHIFT)
#define CV_8U 0
#define CV_8S 1
#define CV_16U 2
#define CV_16S 3
#define CV_32S 4
#define CV_32F 5
#define CV_64F 6
#define CV_16F 7
#define CV_MAT_DEPTH_MASK (CV_DEPTH_MAX - 1)
#define CV_MAT_DEPTH(flags) ((flags) & CV_MAT_DEPTH_MASK)
#define CV_MAKETYPE(depth,cn) (CV_MAT_DEPTH(depth) + (((cn)-1) << CV_CN_SHIFT))
#define CV_MAKE_TYPE CV_MAKETYPE
#define CV_8UC1 CV_MAKETYPE(CV_8U,1)
#define CV_8UC2 CV_MAKETYPE(CV_8U,2)
#define CV_8UC3 CV_MAKETYPE(CV_8U,3)
#define CV_8UC4 CV_MAKETYPE(CV_8U,4)
#define CV_8UC(n) CV_MAKETYPE(CV_8U,(n))
#define CV_8SC1 CV_MAKETYPE(CV_8S,1)
#define CV_8SC2 CV_MAKETYPE(CV_8S,2)
#define CV_8SC3 CV_MAKETYPE(CV_8S,3)
#define CV_8SC4 CV_MAKETYPE(CV_8S,4)
#define CV_8SC(n) CV_MAKETYPE(CV_8S,(n))
#define CV_16UC1 CV_MAKETYPE(CV_16U,1)
#define CV_16UC2 CV_MAKETYPE(CV_16U,2)
#define CV_16UC3 CV_MAKETYPE(CV_16U,3)
#define CV_16UC4 CV_MAKETYPE(CV_16U,4)
#define CV_16UC(n) CV_MAKETYPE(CV_16U,(n))
#define CV_16SC1 CV_MAKETYPE(CV_16S,1)
#define CV_16SC2 CV_MAKETYPE(CV_16S,2)
#define CV_16SC3 CV_MAKETYPE(CV_16S,3)
#define CV_16SC4 CV_MAKETYPE(CV_16S,4)
#define CV_16SC(n) CV_MAKETYPE(CV_16S,(n))
#define CV_32SC1 CV_MAKETYPE(CV_32S,1)
#define CV_32SC2 CV_MAKETYPE(CV_32S,2)
#define CV_32SC3 CV_MAKETYPE(CV_32S,3)
#define CV_32SC4 CV_MAKETYPE(CV_32S,4)
#define CV_32SC(n) CV_MAKETYPE(CV_32S,(n))
#define CV_32FC1 CV_MAKETYPE(CV_32F,1)
#define CV_32FC2 CV_MAKETYPE(CV_32F,2)
#define CV_32FC3 CV_MAKETYPE(CV_32F,3)
#define CV_32FC4 CV_MAKETYPE(CV_32F,4)
#define CV_32FC(n) CV_MAKETYPE(CV_32F,(n))
#define CV_64FC1 CV_MAKETYPE(CV_64F,1)
#define CV_64FC2 CV_MAKETYPE(CV_64F,2)
#define CV_64FC3 CV_MAKETYPE(CV_64F,3)
#define CV_64FC4 CV_MAKETYPE(CV_64F,4)
#define CV_64FC(n) CV_MAKETYPE(CV_64F,(n))
#define CV_16FC1 CV_MAKETYPE(CV_16F,1)
#define CV_16FC2 CV_MAKETYPE(CV_16F,2)
#define CV_16FC3 CV_MAKETYPE(CV_16F,3)
#define CV_16FC4 CV_MAKETYPE(CV_16F,4)
#define CV_16FC(n) CV_MAKETYPE(CV_16F,(n))
//! @}
//! @name Comparison operation
//! @sa cv::CmpTypes
//! @{
#define CV_HAL_CMP_EQ 0
#define CV_HAL_CMP_GT 1
#define CV_HAL_CMP_GE 2
#define CV_HAL_CMP_LT 3
#define CV_HAL_CMP_LE 4
#define CV_HAL_CMP_NE 5
//! @}
//! @name Border processing modes
//! @sa cv::BorderTypes
//! @{
#define CV_HAL_BORDER_CONSTANT 0
#define CV_HAL_BORDER_REPLICATE 1
#define CV_HAL_BORDER_REFLECT 2
#define CV_HAL_BORDER_WRAP 3
#define CV_HAL_BORDER_REFLECT_101 4
#define CV_HAL_BORDER_TRANSPARENT 5
#define CV_HAL_BORDER_ISOLATED 16
//! @}
//! @name DFT flags
//! @{
#define CV_HAL_DFT_INVERSE 1
#define CV_HAL_DFT_SCALE 2
#define CV_HAL_DFT_ROWS 4
#define CV_HAL_DFT_COMPLEX_OUTPUT 16
#define CV_HAL_DFT_REAL_OUTPUT 32
#define CV_HAL_DFT_TWO_STAGE 64
#define CV_HAL_DFT_STAGE_COLS 128
#define CV_HAL_DFT_IS_CONTINUOUS 512
#define CV_HAL_DFT_IS_INPLACE 1024
//! @}
//! @name SVD flags
//! @{
#define CV_HAL_SVD_NO_UV 1
#define CV_HAL_SVD_SHORT_UV 2
#define CV_HAL_SVD_MODIFY_A 4
#define CV_HAL_SVD_FULL_UV 8
//! @}
//! @name Gemm flags
//! @{
#define CV_HAL_GEMM_1_T 1
#define CV_HAL_GEMM_2_T 2
#define CV_HAL_GEMM_3_T 4
//! @}
//! @}
#endif // 创建mat对象
Mat t1 = Mat(256, 256, CV_8UC3);
// Scalar(...) 是一个标量,表示一个颜色值
// 灰度图像是一个通道的,一个参数就可以
t1 = Scalar(0, 0, 255);
imshow("t1", t1);
// 方法2
Mat t2 = Mat(Size(512, 512), CV_8UC3);
t2 = Scalar(255, 0, 255);
imshow("t2", t2);
// 创建时指定大小
Mat t3 = Mat::zeros(Size(256, 256), CV_8UC3);
imshow("t3", t3);
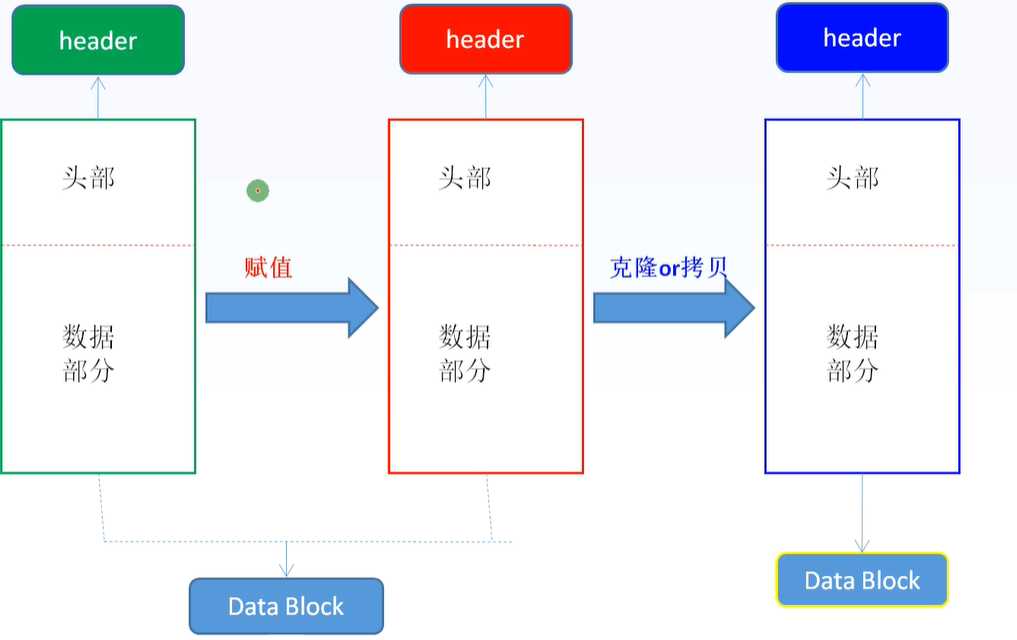
// 从现有的图像create
// 只是对象引用的赋值,本质上还是一张图像
// 如果对原图像进行修改,t4也会被修改
Mat t4 = src;
// 克隆,是一个新的对象
// 对原图进行修改,t5并不改变
Mat t5 = src.clone();
imshow("t5", t5);
// 拷贝
Mat t6;
src.copyTo(t6);
imshow("t6", t6);
// 创建一个和现有图像大小、类型一样的空白图像
Mat t7 = Mat::zeros(src.size(), src.type());标签:open parent ogr waitkey 灰度 cst mode process byte
原文地址:https://www.cnblogs.com/wbyixx/p/12241903.html