标签:line top hal 技术 header cos mes date vector
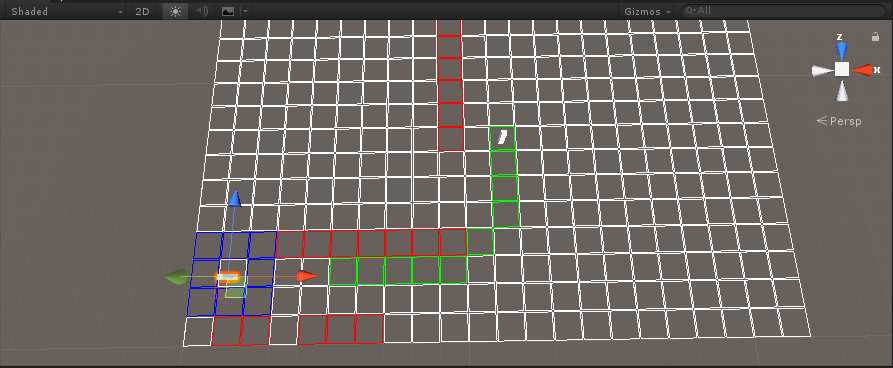
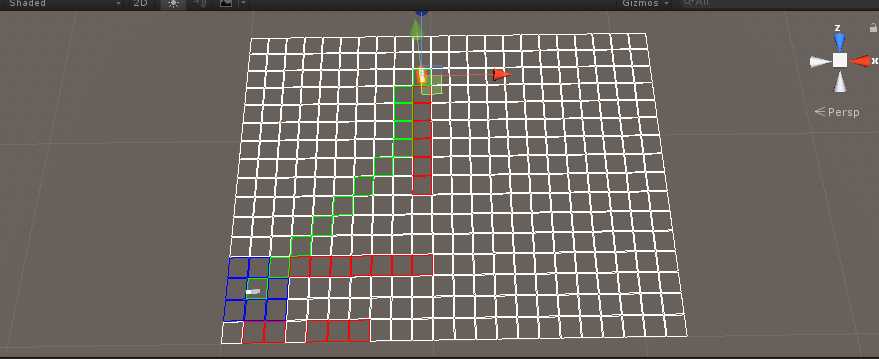
<1>效果
白色:可行走
红色:阻碍
蓝色:起点周围的格子
绿色:路径
<2>代码
using System.Collections; using System.Collections.Generic; using UnityEngine; using System.Diagnostics; using Debug = UnityEngine.Debug; namespace JPS { /// <summary> /// 0-1 1 /// </summary> public class Grid { public short state;//0可以行走 1阻碍 2边界 public int index; } /// <summary> /// JPS寻路 /// 通过NavMesh生成网格数据 /// JPS算法生成路径 /// </summary> public class JPSTest : MonoBehaviour { public float size = 0.5f; private float halfSize; public int col = 10; public int row = 10; public Vector3 startPos; public List<int> lockLst = new List<int>(); [Space] [Header("寻路起点")] public Transform p1; [Header("寻路终点")] public Transform p2; private List<Grid> grids = new List<Grid>(); private List<int> pathLst = new List<int>(); public Dictionary<int, int[]> dirMap = new Dictionary<int, int[]> { { 1 ,new int[3]{ 1,1,14} }, { 2 ,new int[3]{ 0,1,10} }, { 3 ,new int[3]{ -1,1,14} }, { 4 ,new int[3]{ -1,0,10} }, { 5 ,new int[3]{ -1,-1,14} }, { 6 ,new int[3]{ 0,-1,10} }, { 7 ,new int[3]{ 1,-1,14} }, { 8 ,new int[3]{ 1,0,10} }, }; // Start is called before the first frame update void Start() { halfSize = size * 0.5f; initGrid(); } void initGrid() { for (int i = 1; i <= row; i++) { for (int j = 1; j <= col; j++) { Grid grid = new Grid(); grid.index = (i - 1) * col + j; int st = lockLst.Contains(grid.index) ? 1 : 0; grid.state = (short)st; grids.Add(grid); } } } Vector3 getPosByIndex(int index) { Vector3 pos = Vector3.zero; int r = getRow(index);// Mathf.CeilToInt(index / (float)col); int c = getCol(index);// index % col; //c = c == 0 ? col : c; pos.y = startPos.y; pos.x = startPos.x + (c - 1) * size + size / 2; pos.z = startPos.z + (r - 1) * size + size / 2; return pos; } List<int> find(int start, int end) { List<int> closeLst = new List<int>(); List<int> openLst = new List<int>(); closeLst.Add(start); int count = 0; while (closeLst[closeLst.Count - 1] != end) { count++; if (count > 200) { Debug.LogError("寻路失败"); break; } int index = closeLst[closeLst.Count - 1]; int min = getMinCostIndex(index, end, closeLst); if (min < 0) break; closeLst.Add(min); } return closeLst; } List<int> find(Vector3 start, Vector3 end) { return find(getIndexByPos(start), getIndexByPos(end)); } int getMinCostIndex(int org, int end, List<int> closeLst) { List<int> indexMap = new List<int>(); int[] delta = new int[2]; int r = getRow(org); int c = getCol(org); int endRow = getRow(end); int endCol = getCol(end); int cost = int.MaxValue; int minIndex = -1; foreach (var item in dirMap) { int[] xy = item.Value; delta[0] = xy[0] + r; delta[1] = xy[1] + c; int idx = (delta[0] - 1) * col + delta[1]; if (isVaildIndex(delta) && !closeLst.Contains(idx)) { Grid idxGrid = grids[idx - 1]; //不是阻挡点 if (idxGrid.state == 0) { //计算cost int G = xy[2]; int H = Mathf.Abs(endRow - delta[0]) + Mathf.Abs(endCol - delta[1]); int F = G + H * 10; if (F < cost) { cost = F; minIndex = idx; } } } } return minIndex; } List<int> getGridAround(int index) { List<int> indexMap = new List<int>(); int[] delta = new int[2]; int r = getRow(index); int c = getCol(index); foreach (var item in dirMap) { int[] xy = item.Value; delta[0] = xy[0] + r; delta[1] = xy[1] + c; if (isVaildIndex(delta)) { indexMap.Add((delta[0] - 1) * col + delta[1]); } } return indexMap; } private int getRow(int index) { return Mathf.CeilToInt((index - 0.1F) / col); } private int getCol(int index) { int c = index % col; return c == 0 ? col : c; } //验证合法性 private bool isVaildIndex(int[] xy) { return xy[0] > 0 && xy[0] <= row && xy[1] > 0 && xy[1] <= col; } private void OnGUI() { if (GUILayout.Button("find Path", GUILayout.Width(100), GUILayout.Height(40))) { if (p1 != null && p2 != null) { Stopwatch stopwatch = new Stopwatch(); stopwatch.Start(); pathLst = find(p1.position, p2.position); stopwatch.Stop(); Debug.LogError(stopwatch.ElapsedMilliseconds); } } if (GUILayout.Button("clear Path", GUILayout.Width(100), GUILayout.Height(40))) { pathLst.Clear(); } } private void OnDrawGizmos() { if (grids.Count > 0) { for (int i = 0; i < grids.Count; i++) { Grid grid = grids[i]; int index = grid.index; Gizmos.color = grid.state == 0 ? Color.white : Color.red; Vector3 pos = getPosByIndex(index); //Gizmos.DrawCube(pos, cubeSize); drawLine(pos); } drawAround(); drawPath(); } } void drawLine(Vector3 pos) { float y = pos.y;// 1f; float scale = 0.95f; float halfSize = size * 0.5f * scale; Vector3 p1 = new Vector3(pos.x + halfSize, y, pos.z - halfSize); Vector3 p2 = new Vector3(pos.x + halfSize, y, pos.z + halfSize); Vector3 p3 = new Vector3(pos.x - halfSize, y, pos.z + halfSize); Vector3 p4 = new Vector3(pos.x - halfSize, y, pos.z - halfSize); Gizmos.DrawLine(p1, p2); Gizmos.DrawLine(p2, p3); Gizmos.DrawLine(p3, p4); Gizmos.DrawLine(p4, p1); } int getIndexByPos(Vector3 pos) { float subX = pos.x - startPos.x; float subZ = pos.z - startPos.z; //10/col int c = Mathf.CeilToInt(subX / size); int r = Mathf.CeilToInt(subZ / size); return (r - 1) * col + c; } void drawAround() { if (p1 != null) { int index = getIndexByPos(p1.position); List<int> round = getGridAround(index); for (int i = 0; i < round.Count; i++) { int idx = round[i]; Vector3 pos = getPosByIndex(idx); Gizmos.color = Color.blue; drawLine(pos); Gizmos.color = Color.green; } } } void drawPath() { if (pathLst != null && pathLst.Count > 0) { for (int i = 0; i < pathLst.Count; i++) { int idx = pathLst[i]; Gizmos.color = Color.green; drawLine(getPosByIndex(idx)); Gizmos.color = Color.white; } } } } }
<3>思路 todo
标签:line top hal 技术 header cos mes date vector
原文地址:https://www.cnblogs.com/cocotang/p/12243421.html