标签:控制 上下 平台 应用 bullet 领域 技术 误差 转换
并联机器人(Parallel Mechanism)为动平台和定平台通过至少两个独立的运动链相连接,机构具有两个或两个以上自由度,且以并联方式驱动的一种闭环机构,并联机构的特点:无累积误差,精度较高;驱动装置可置于定平台上或接近定平台的位置,这样运动部分重量轻,速度高,动态响应好;结构紧凑,刚度高,承载能力大;完全对称的并联机构具有较好的各向同性;工作空间较小;与串联机构相比刚度大,结构稳定;承载能力大;微动精度高;运动负荷小;在位置求解上,串联机构正解容易,但反解十分困难,而并联机构正解困难反解却非常容易。


并联机构虽然说是多种多样的,但大部分都是由标准的Stewart平台演化而来,应用于国防军事船舶飞机等实验平台的测试,针对标准Stewart平台的位姿解算如下:在并联机构中知道目标位姿求取每根杆长的反解计算为唯一解,知道每根杆的伸缩量求取目标位姿存在冗余解,计算比较困难,会出现奇异位姿。这与串联机器人恰好相反,一般能采用反解则进行反解计算。
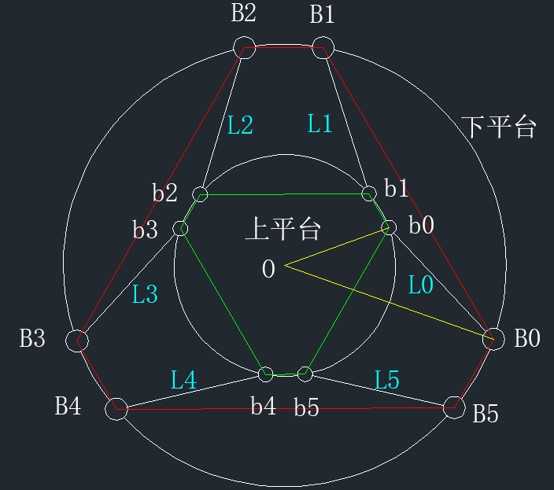
下面是其平台的简化结构图,上下两个圆盘分别为上平台和下平台,B0~B5为下平台的六个固定铰链,b0~b5为上平台的六个固定铰链,L0~L5为六根伸缩杆。
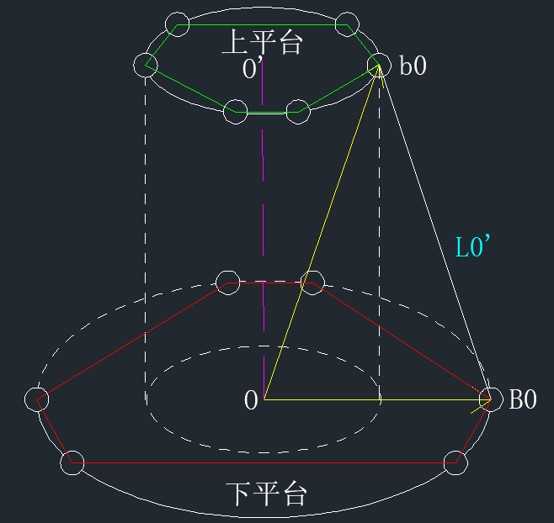
从机构侧面看,即将上平台移上去,这中间经过了平移和旋转,要知道六根杆之间怎么配合,每根杆伸长多长才能达到想要的目标位姿,需要经过位姿反解计算。
旋转矩阵为:
\[{}_B^bT = \left[ {\begin{array}{*{20}{c}}
{\cos {r_y}\cos {r_z}}&{ - \cos {r_y}\sin {r_z}}&{\sin {r_y}}\\
{\sin {r_x}\sin {r_y}\cos {r_z} + \cos {r_x}\sin {r_z}}&{\cos {r_x}\sin {r_z} - \sin {r_x}\sin {r_y}\sin {r_z}}&{ - \sin {r_x}\cos {r_y}}\\
{\sin {r_x}\sin {r_z} - \cos {r_x}\sin {r_y}\cos {r_z}}&{\sin {r_x}\cos {r_z} + \cos {r_x}\sin {r_y}\sin {r_z}}&{\cos {r_x}\cos {r_y}}
\end{array}} \right]\]
到达目标位姿的向量:
$\overrightarrow {O{b_0}} = {}_B^bT \bullet \overrightarrow {{O^‘}{b_0}} + \overrightarrow P $,其中P代表上平台从下平台重合位置的平移量$\overrightarrow {OO‘} $
\[\overrightarrow P = {\left[ {\begin{array}{*{20}{c}}
{{x_p}}&{{y_p}}&{{z_p}}
\end{array}} \right]^T}\]
向量$\overrightarrow {{B_0}{b_0}} = \overrightarrow {O{b_0}} - \overrightarrow {O{B_0}} $,杆长${L_0}‘ = \left| {\overrightarrow {{B_0}{b_0}} } \right|$,杆的伸缩变化量$\Delta l = {L_0}‘ - {L_0}$,其余六根同理。
这样就获得了到达目标位姿每根杆的伸缩量,在控制上转换成相应的脉冲、电压、等控制信号就可以使六根杆配合起来,驱动上平台动作。
标签:控制 上下 平台 应用 bullet 领域 技术 误差 转换
原文地址:https://www.cnblogs.com/fuzhuoxin/p/12246903.html