标签:说明 参数 unit 推导 nts bsp blank das lan
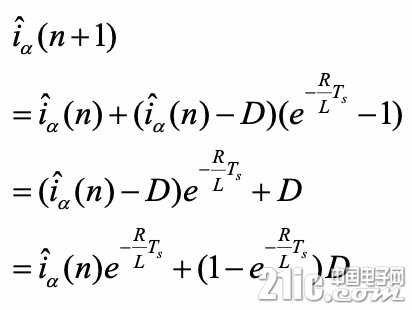
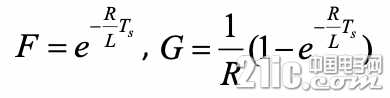
TI eSMO 库 Fsmopos 和 Gsmopos 参数解析
原文地址:https://www.cnblogs.com/hushunlin/p/12249481.html