标签:ram pos min lol att lib win32 dep crt
新建C++空项目
1、ode相关头文件加入工程文件中
属性->配置属性->C/C++ ->常规->附加包含目录 :
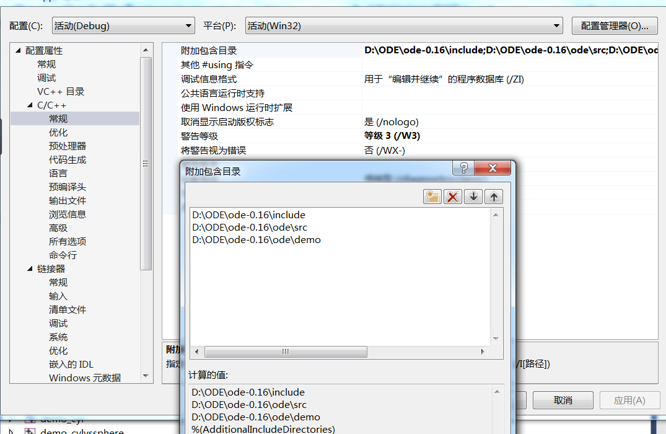 |
D:\ODE\ode-0.16\include |
||
2、引入 ode 依赖的库文件 ode_doubled.lib, drawstuffd.lib
属性->配置属性->链接器->输入->附加依赖项:
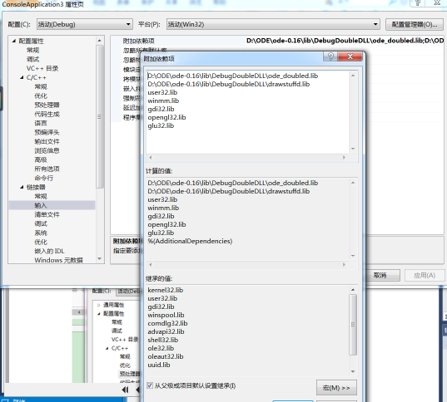 |
D:\ODE\ode-0.16\lib\DebugDoubleDLL\ode_doubled.lib |
|
3、加入预编译定义 dDOUBLE
属性->配置属性->C/C++ ->预处理器->预处理器定义->
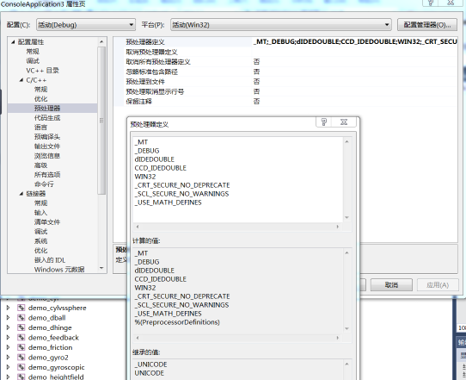 |
_MT |
|
4、资源文件设置
对应的dll文件复制到C/windows/sys32 or sysWOW64
Drawstuffd.dll
ode_doubled.dll
#include "texturepath.h"
头文件里面对应的位置F:/ODE/drawstuff/textures
A typical simulation will proceed like this:
标签:ram pos min lol att lib win32 dep crt
原文地址:https://www.cnblogs.com/zhaochenliang/p/12267072.html