标签:cal gaussian reg from ssi mat imu parameter mod
The marginal likelihood is the integral of the likelihood times the prior
$$ p(y|X) = \int p(y| f, X) p(f | X) df $$
The term marginal likelihood refers to the marginalization over the function value $f$. Under the Gaussian process model the prior is Gaussian, $f \sim \mathcal N(0, K)$, or
$$ \text{log}p(f|X) = -\frac{1}{2} f^T K^{-1} f – \frac{1}{2} \text{log} |K| – \frac{n}{2} \text{log} 2\pi $$
and the likelihood is a factorized Gaussian $y|f \sim \mathcal N (f, \sigma_n^2 I)$, so we can perform the integration yielding the log marginal likehood.
$$ \text{log}p(y|X) = -\frac{1}{2}y^T (K + \sigma_n^2 I)^{-1} y – \frac{1}{2} \text{log} |K + \sigma_n^2 I| – \frac{n}{2} \text{log} 2\pi $$
This result can also be obtained directly by observing that $y \sim \mathcal N(0, K + \sigma_n^2 I)$
2. Hyperparameters
Typically the covariance function that we used will have some free parameters. For example, the squared-exponential covariance function in one dimension has the following form
$$ k(x_p,x_q) = \sigma_f^2 \text{exp} (\frac{1}{2l^2}(x_p-x_q)^2) + \sigma_n^2 \delta_{pq} $$
Observe that the length-scale $l$, the signal variance $\sigma_f^2$ and the noise variance $\sigma_n^2$ can be varied. In general, we call the free parameters hyperparameters.
So, we can sweep this parameter to get a best regression result.
2.1 sweep length scale
N means the number of training sample.
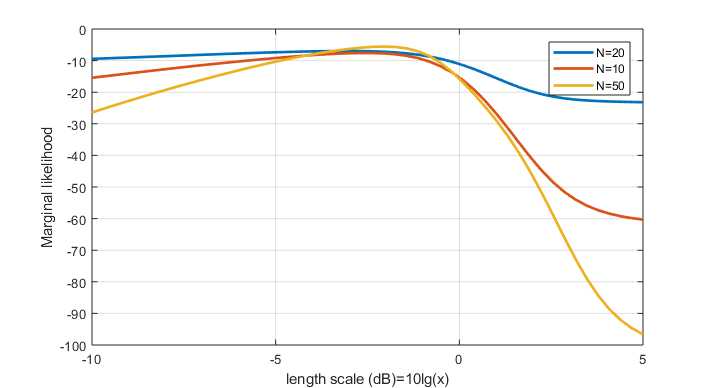
https://github.com/elike-ypq/Gaussian_Process/blob/master/sweep_length_scale.m
2.2 sweep length scale $l$ and noise level ($\sigma_n^2$)
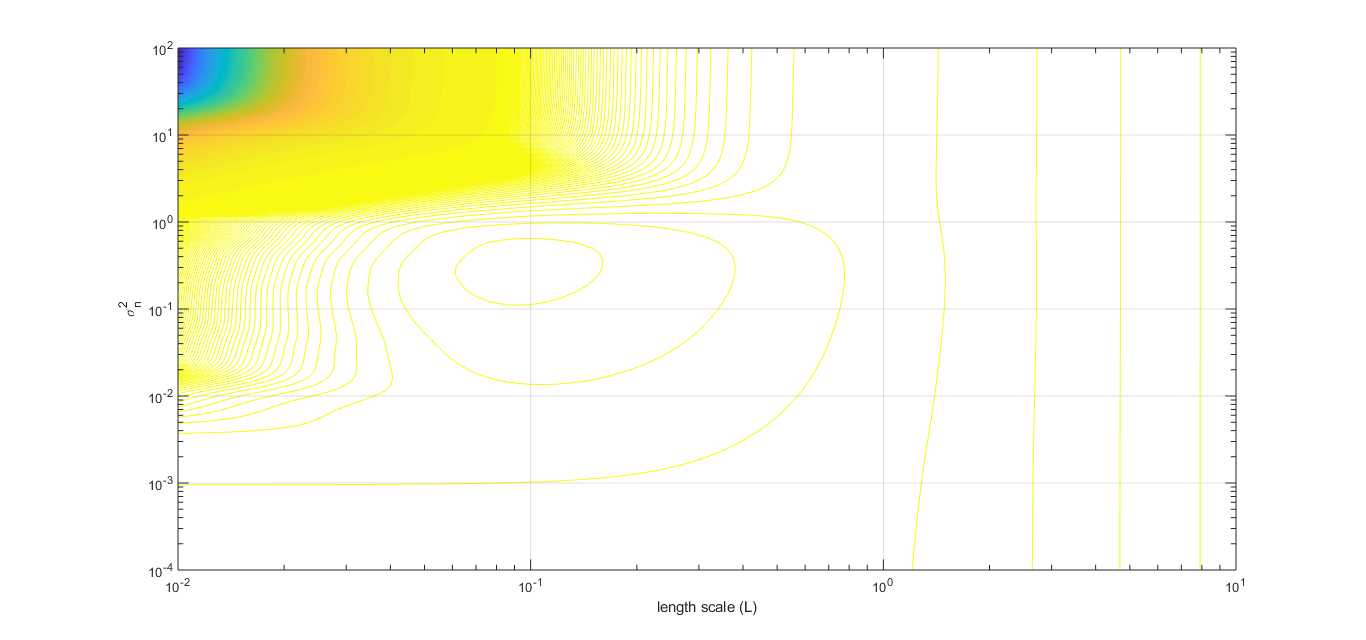
https://github.com/elike-ypq/Gaussian_Process/blob/master/sweep_length_scale_n_sigma_3D.m
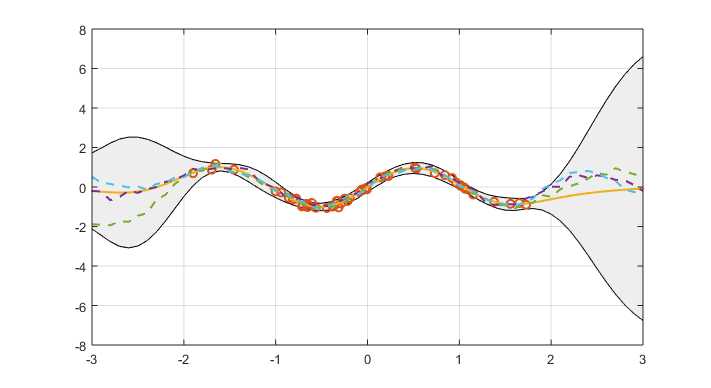
From above picture, the optimum value of $l$ and $\sigma_n^2$ for this regression is calculated out. And the best regression is shown as following
标签:cal gaussian reg from ssi mat imu parameter mod
原文地址:https://www.cnblogs.com/eliker/p/11326251.html