标签:方便 set ++ i++ 变量 流程 对比 目的 安装
背景:
随着人们的生活水平不断提高,家居生活现代化是个必然的趋势。智能垃圾桶很好的解决了无需接触垃圾桶就可投放垃圾,防止交叉感染等问题。减少生活当中各种病菌交叉感染的几率;无异味溢出。但其存在需要经常更换电池,电池寿命问题。
目的:
第一:通过这篇文章,大致能了解目前市面上智能垃圾桶的工作原理。
第二:当使用电池供电,可能对于此产品来讲,功耗会偏大。采用外部供电方式,是否能满足需求。
第三:设计一个产品模型可能不需要考虑很多因素,但设计一款产品考虑因素还有哪些,讨论一下。
实验材料
Arduino控制板 9G舵机 超声波模块
什么是Arduino控制板
它是一款便捷灵活、方便上手的开源型平台。对于初学者是一款极易上手的硬件。
超声波模块的工作原理
通过Trig引脚发一个 10US 以上的高电平,就可以在Echo接收口等待高电平输出;一有输出就可以开定时器计时,当此口变为低电平时就可以读定时器的值,此时就为此次测距的时间,方可算出距离.如此不断的周期测,就可以达到你移动测量的值了。
可能您对此还有疑惑,我们将其换成程序流程:
a.单片机引脚触发Trig测距,给至少 10us 的高电平信号;
b.模块自动发送 8 个 40khz 的方波,自动检测是否有信号返回;
c.有信号返回,通过 IO 输出一高电平,并单片机定时器计算高电平持续的时间;
d.超声波从发射到返回的时间.
计算公式:测试距离=(高电平时间*声速(340M/S))/2;
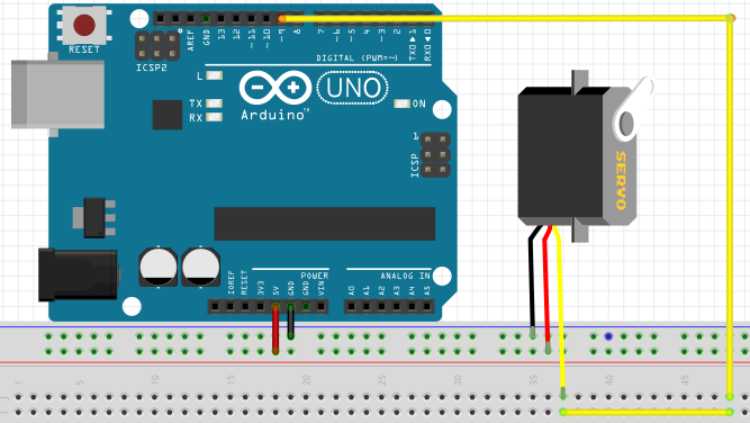
接下来,我们来上系统连接图
舵机连接图如下:
橙色:信号线 D9 红色:5V 灰色:GND
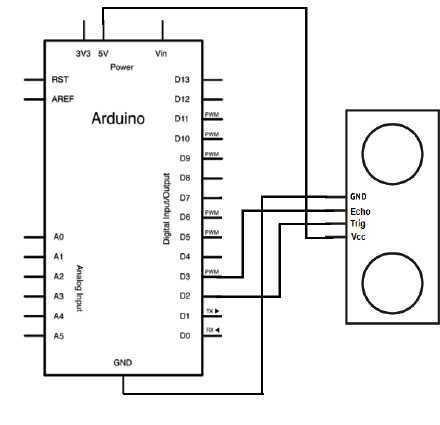
超声波模块连接如下:
GND——GND
Echo——数字信号 D2
Trig——数字信号 D3
GND——GND
连接好以后,就要编写程序了
#include <Servo.h> //调用库函数
Servo servo; //定义舵机变量名
int servoPin = 9; //定义舵机接口9,只有9或者10可用
int trigPin =2; // // trig接2端口
int echoPin = 3; // echo接3端口
long duration, distance; //定义变量,用于存取数据
long aver[3]; //定义数组,用于存取数据
void setup() {
servo.attach(servoPin); //设定舵机的接口,9或者10接口可利用
pinMode(trigPin, OUTPUT); //设置为输出模式 触发
pinMode(echoPin, INPUT); //设置其为输入模式 回声
servo.write(0); //用于设定舵机旋转角度的语句,可设定的角度范围是0°到180°。
delay(1000); //延时1S;
servo.detach(); //使舵机与其接口分离,该接口9可继续被用作PWM接口。
}
//超声波测距,子程序
void measure() {
digitalWrite(trigPin, LOW);//给一个低电平
delayMicroseconds(5);//时间为5毫秒
digitalWrite(trigPin, HIGH);//给一个高电平
delayMicroseconds(15);//时间为15毫秒
digitalWrite(trigPin, LOW);//再给一个低电平
duration = pulseIn(echoPin, HIGH);//接收高电平时间
distance = duration *0.034 / 2;//计算距离
}
void loop() {
//将测量数值记录在数组里面
for (int i=0;i<=2;i++) {
measure();
aver[i]=distance;
delay(50);
}
//算三次的平均值
distance=(aver[0]+aver[1]+aver[2])/3;
Serial.println(distance); //打印
//如果距离小于40,转动舵机70°
if (distance<40) {
servo.attach(servoPin); //设定舵机的接口,9接口可利用
delay(1);
servo.write(70); //转动舵机70°
delay(5000); //延时5秒
servo.write(0); //转回0°
delay(1000);//延时1秒
servo.detach(); //使舵机与其接口分离,该接口9可继续被用作PWM接口。
}
}
以上写有程序及注释,可根据自己需求修改参数(主要是修改舵机角度以及延时时间—servo.write(70); //转动舵机70° delay(5000); //延时5秒)
根据上述描述过程,我们就可以实现自动感应扔垃圾的需求。当然,我们可以将超声波检测模块更换成热释红外模块、触摸模块。
感想
通过制作智能垃圾桶模型,我们知道了智能垃圾桶的实现原理,在垃圾桶上安装一个传感器模块,用来检测外部环境的变化,当外部环境发生变化时,做出反应,以达到智能的效果。
在制作模型时,选用模块安装固定还相对容易,但用在现实生活中就相对比较困难,首先,普通垃圾桶没有盖子,有盖子的垃圾桶舵机安装有问题等,还有就是供电问题,Arduino可采用9V或12V充电器进行外部供电,但会受地方限制;如采用电池供电,由于模块耗电量大而容易经常更换电池。
思考
智能的真正目的是使人们的生活更加方便,而采用Arduino控制板,能否将产品做出来,解决我们生活当中的痛点,以方便我们的生活吗?
标签:方便 set ++ i++ 变量 流程 对比 目的 安装
原文地址:https://www.cnblogs.com/fqhy/p/12287903.html