标签:example space 尺寸 ase poi 创建 特征提取 point 工作
本文将介绍COLMAP的安装与使用,重点介绍3D重建过程中每个步骤的输入输出。
在GitHub上下载COLMAP源代码(我用的是3.5版本),下载后进入colmap目录编译
cd ./colmap-3.5 # 进入colmap目录
mkdir build && cd ./build # 创建build文件夹,并进入
cmake .. # cmake
make -j8 # make多线程编译也许在编译过程中会出现一些问题,不要慌,我们去colmap的Github-Issues中去找一下。
Anaconda相关问题因为我们做的是:基于多视图图像的三维重建,所以首先我们需要一些待重建的图片
我们用的是ETH3D数据集中的terrace场景

我们将图片组织为colmap的工程格式:
/path/to/project/...
+── images
│ +── image1.jpg
│ +── image2.jpg
│ +── ...
│ +── imageN.jpg工作目录中包含一个images文件夹,images中即为待重建的图片,Pipes图片的百度云链接,提取码8tn2
以下所有命令均可在COLMAP官方说明文档上查阅。
colmap提供了自动重建的命令,我们这里还是逐步进行重建,以观察每一步的输入输出结果。
./colmap feature_extractor --database_path $DATASET_PATH/database.db \ # 输出:特征点保存至数据库`database.db`
--image_path $DATASET_PATH/images # 输入:多视图图像./colmap exhaustive_matcher --database_path $DATASET_PATH/database.db # 输入输出:数据库文件`database.db`mkdir $DATASET_PATH/sparse # 新建sparse文件夹
./colmap mapper --database_path $DATASET_PATH/database.db \ # 输入:数据库文件`database.db`
--image_path $DATASET_PATH/images \ # 输入:多视图图像
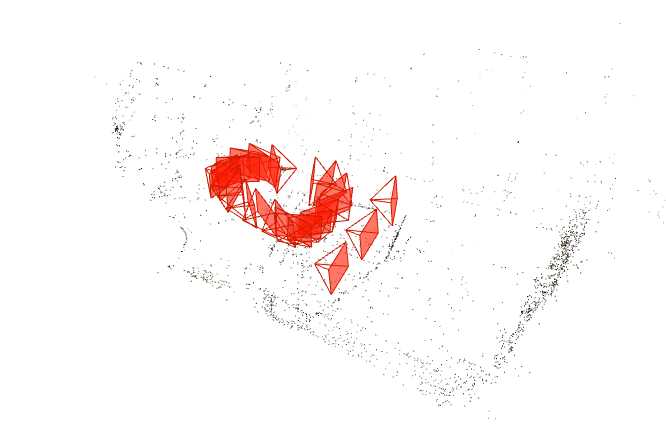
--output_path $DATASET_PATH/sparse # 输出:`sparse`文件夹输出结果sparse文件夹如下所示??
└── sparse # 稀疏重建结果
└── 0
├── cameras.bin # 相机内参
├── images.bin # 相机位姿
├── points3D.bin
└── project.inimkdir $DATASET_PATH/dense # 新建dense文件夹
./colmap image_undistorter --image_path $DATASET_PATH/images \ # 输入:多视图图像
--input_path $DATASET_PATH/sparse/0 \ # 输入:sparse文件夹
--output_path $DATASET_PATH/dense \ # 输出:dense文件夹
--output_type COLMAP \ # 参数:输出格式
--max_image_size 2000 # 参数:最大图像尺寸输出结果dense文件夹如下所示??
└── dense
?? ├── images
?? │?? ├── DSC_0259.JPG
?? │?? ├── DSC_0260.JPG
?? │?? ├── ...
?? │?? └── DSC_0285.JPG
?? ├── run-colmap-geometric.sh
?? ├── run-colmap-photometric.sh
?? ├── sparse
?? │?? ├── cameras.bin
?? │?? ├── images.bin
?? │?? └── points3D.bin
?? └── stereo
?? ├── consistency_graphs
?? ├── depth_maps
?? ├── fusion.cfg
?? ├── normal_maps
?? └── patch-match.cfg./colmap patch_match_stereo --workspace_path $DATASET_PATH/dense \ # 输入输出:dense文件夹
--workspace_format COLMAP \ # 参数:工作区格式
--PatchMatchStereo.geom_consistency true 稠密重建的结果:为每张图像估计depth_map和normal_map
└── dense
?? ├── images # resize后的图像
?? │?? ├── DSC_0259.JPG
?? │?? ├── DSC_0260.JPG
?? │?? ├── ...
?? │?? └── DSC_0285.JPG
?? ├── run-colmap-geometric.sh
?? ├── run-colmap-photometric.sh
?? ├── sparse
? │?? ├── cameras.bin
?? │?? ├── images.bin
?? │?? └── points3D.bin
?? └── stereo
?? ├── consistency_graphs
? ├── depth_maps
?? │?? ├── DSC_0259.JPG.geometric.bin
?? │?? ├── DSC_0259.JPG.photometric.bin
?? │?? ├── ...
? │?? ├── ...
?? │?? ├── DSC_0285.JPG.geometric.bin
?? │?? └── DSC_0285.JPG.photometric.bin
├── fusion.cfg
?? ├── normal_maps
?? │?? ├── DSC_0259.JPG.geometric.bin
?? │?? ├── DSC_0259.JPG.photometric.bin
? │?? ├── ...
? │?? ├── ...
? │?? ├── DSC_0285.JPG.geometric.bin
? │?? └── DSC_0285.JPG.photometric.bin
? └── patch-match.cfg./colmap stereo_fusion --workspace_path $DATASET_PATH/dense \ # 输入:dense文件夹
--workspace_format COLMAP \ # 参数:工作区格式
--input_type geometric \ # 参数:输入类型
--output_path $DATASET_PATH/dense/fused.ply # 输出:fused.ply文件使用model_converter将sparse文件夹中的bin文件转为txt文件。使用COLMAP GUI对稀疏重建结果进行可视化

原图、
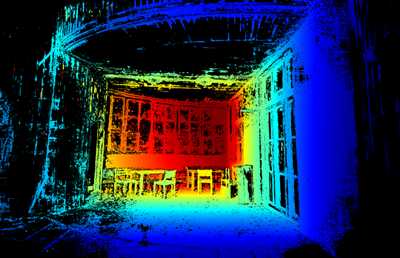
深度图、

法向图


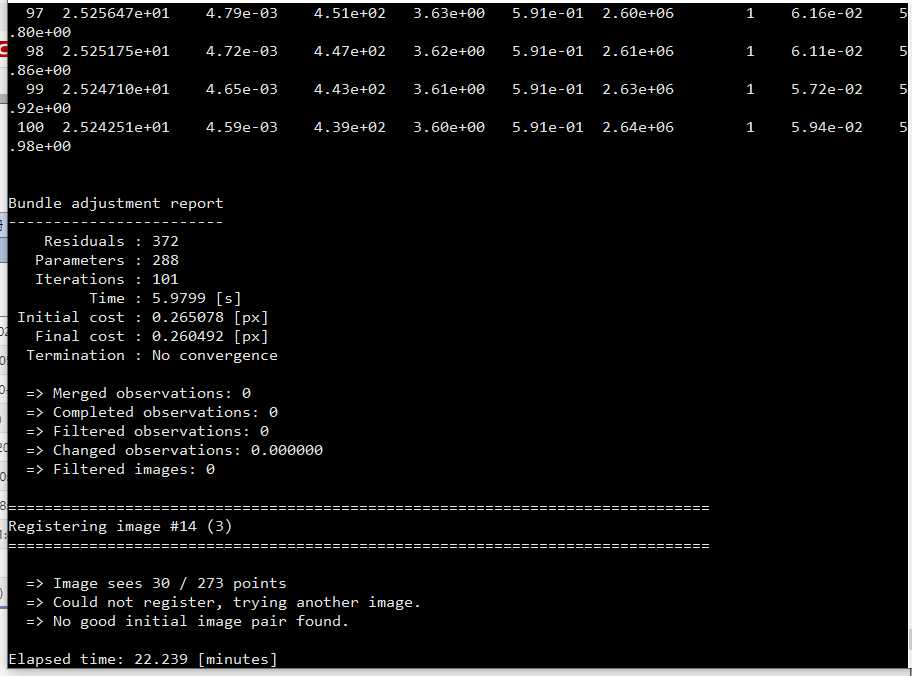
Pipes场景SfM失败
标签:example space 尺寸 ase poi 创建 特征提取 point 工作
原文地址:https://www.cnblogs.com/Todd-Qi/p/10792685.html