标签:fun cat 取数据 随机梯度 put gre sample print The
#!/usr/bin/env python # coding: utf-8 import torch import time # init variable a, b as 1000 dimension vector n = 1000 a = torch.ones(n) b = torch.ones(n)
# define a timer class to record time class Timer(object): """Record multiple running times.""" def __init__(self): self.times = [] self.start() def start(self): # start the timer self.start_time = time.time() def stop(self): # stop the timer and record time into a list self.times.append(time.time() - self.start_time) return self.times[-1] def avg(self): # calculate the average and return return sum(self.times)/len(self.times) def sum(self): # return the sum of recorded time return sum(self.times)
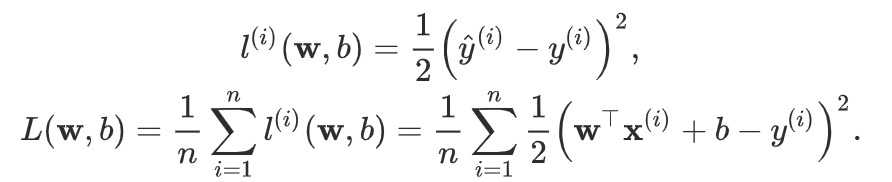
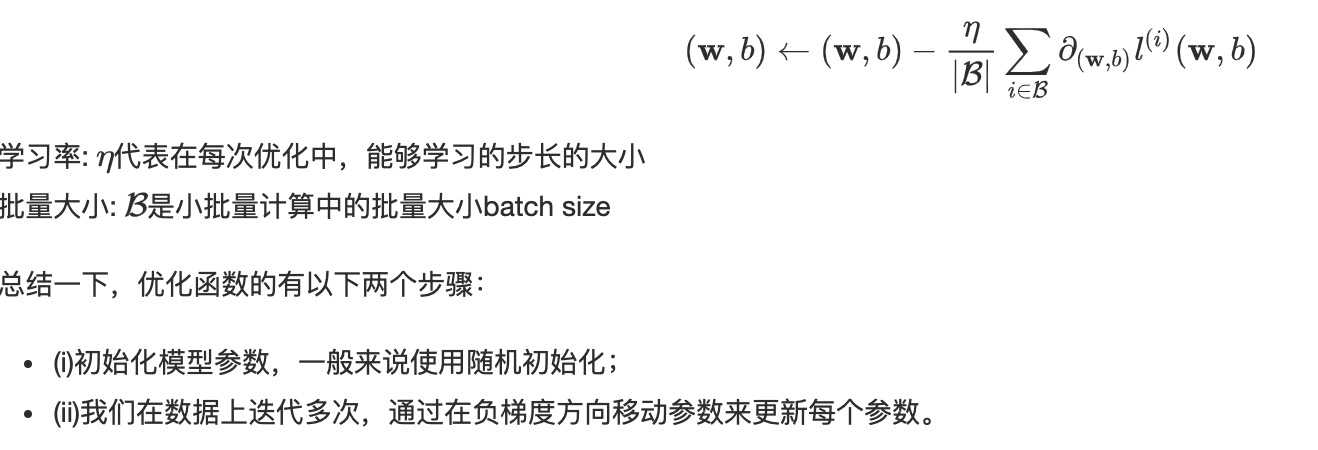
timer = Timer() c = torch.zeros(n) for i in range(n): c[i] = a[i] + b[i] ‘%.5f sec‘ % timer.stop() timer.start() d = a + b ‘%.5f sec‘ % timer.stop() # import packages and modules get_ipython().run_line_magic(‘matplotlib‘, ‘inline‘) import torch from IPython import display from matplotlib import pyplot as plt import numpy as np import random print(torch.__version__) # ### 线性回归模型从零开始的实现 # set input feature number num_inputs = 2 # set example number num_examples = 1000 # set true weight and bias in order to generate corresponded label true_w = [2, -3.4] true_b = 4.2 features = torch.randn(num_examples, num_inputs, dtype=torch.float32) labels = true_w[0] * features[:, 0] + true_w[1] * features[:, 1] + true_b labels += torch.tensor(np.random.normal(0, 0.01, size=labels.size()), dtype=torch.float32) # ### 使用图像来展示生成的数据 plt.scatter(features[:, 1].numpy(), labels.numpy(), 1); # ### 读取数据集 def data_iter(batch_size, features, labels): num_examples = len(features) indices = list(range(num_examples)) random.shuffle(indices) # random read 10 samples for i in range(0, num_examples, batch_size): j = torch.LongTensor(indices[i: min(i + batch_size, num_examples)]) # the last time may be not enough for a whole batch yield features.index_select(0, j), labels.index_select(0, j) batch_size = 10 for X, y in data_iter(batch_size, features, labels): print(X, ‘\n‘, y) break # ### 模型初始化 w = torch.tensor(np.random.normal(0, 0.01, (num_inputs, 1)), dtype=torch.float32) b = torch.zeros(1, dtype=torch.float32) w.requires_grad_(requires_grad=True) b.requires_grad_(requires_grad=True) # ### 定义模型 # 定义用来训练参数的训练模型: # $$ \mathrm{price} = w_{\mathrm{area}} \cdot \mathrm{area} + w_{\mathrm{age}} \cdot \mathrm{age} + b $$ # In[19]: def linreg(X, w, b): return torch.mm(X, w) + b # ### 定义损失函数 # 我们使用的是均方误差损失函数: # $$l^{(i)}(\mathbf{w}, b) = \frac{1}{2} \left(\hat{y}^{(i)} - y^{(i)}\right)^2,$$ # In[16]: def squared_loss(y_hat, y): return (y_hat - y.view(y_hat.size())) ** 2 / 2 # ### 定义优化函数 # 在这里优化函数使用的是小批量随机梯度下降: # $$(\mathbf{w},b) \leftarrow (\mathbf{w},b) - \frac{\eta}{|\mathcal{B}|} \sum_{i \in \mathcal{B}} \partial_{(\mathbf{w},b)} l^{(i)}(\mathbf{w},b)$$ # In[17]: def sgd(params, lr, batch_size): for param in params: param.data -= lr * param.grad / batch_size # ues .data to operate param without gradient track # ### 训练 # 当数据集、模型、损失函数和优化函数定义完了之后就可来准备进行模型的训练了。 # In[20]: # super parameters init lr = 0.03 num_epochs = 5 net = linreg loss = squared_loss # training for epoch in range(num_epochs): # training repeats num_epochs times # in each epoch, all the samples in dataset will be used once # X is the feature and y is the label of a batch sample for X, y in data_iter(batch_size, features, labels): l = loss(net(X, w, b), y).sum() # calculate the gradient of batch sample loss l.backward() # using small batch random gradient descent to iter model parameters sgd([w, b], lr, batch_size) # reset parameter gradient w.grad.data.zero_() b.grad.data.zero_() train_l = loss(net(features, w, b), labels) print(‘epoch %d, loss %f‘ % (epoch + 1, train_l.mean().item())) # In[21]: w, true_w, b, true_b # ### 线性回归模型使用pytorch的简洁实现 # In[22]: import torch from torch import nn import numpy as np torch.manual_seed(1) print(torch.__version__) torch.set_default_tensor_type(‘torch.FloatTensor‘) # ### 生成数据集 # 在这里生成数据集跟从零开始的实现中是完全一样的。 # In[23]: num_inputs = 2 num_examples = 1000 true_w = [2, -3.4] true_b = 4.2 features = torch.tensor(np.random.normal(0, 1, (num_examples, num_inputs)), dtype=torch.float) labels = true_w[0] * features[:, 0] + true_w[1] * features[:, 1] + true_b labels += torch.tensor(np.random.normal(0, 0.01, size=labels.size()), dtype=torch.float) # ### 读取数据集 # In[24]: import torch.utils.data as Data batch_size = 10 # combine featues and labels of dataset dataset = Data.TensorDataset(features, labels) # put dataset into DataLoader data_iter = Data.DataLoader( dataset=dataset, # torch TensorDataset format batch_size=batch_size, # mini batch size shuffle=True, # whether shuffle the data or not num_workers=2, # read data in multithreading ) # In[27]: for X, y in data_iter: print(X, ‘\n‘, y) break # ### 定义模型 # In[28]: class LinearNet(nn.Module): def __init__(self, n_feature): super(LinearNet, self).__init__() # call father function to init self.linear = nn.Linear(n_feature, 1) # function prototype: `torch.nn.Linear(in_features, out_features, bias=True)` def forward(self, x): y = self.linear(x) return y net = LinearNet(num_inputs) print(net) # In[29]: # ways to init a multilayer network # method one net = nn.Sequential( nn.Linear(num_inputs, 1) # other layers can be added here ) # method two net = nn.Sequential() net.add_module(‘linear‘, nn.Linear(num_inputs, 1)) # net.add_module ...... # method three from collections import OrderedDict net = nn.Sequential(OrderedDict([ (‘linear‘, nn.Linear(num_inputs, 1)) # ...... ])) print(net) print(net[0]) # ### 初始化模型参数 # In[30]: from torch.nn import init init.normal_(net[0].weight, mean=0.0, std=0.01) init.constant_(net[0].bias, val=0.0) # or you can use `net[0].bias.data.fill_(0)` to modify it directly # In[31]: for param in net.parameters(): print(param) # ### 定义损失函数 # In[32]: loss = nn.MSELoss() # nn built-in squared loss function # function prototype: `torch.nn.MSELoss(size_average=None, reduce=None, reduction=‘mean‘)` # ### 定义优化函数 # In[33]: import torch.optim as optim optimizer = optim.SGD(net.parameters(), lr=0.03) # built-in random gradient descent function print(optimizer) # function prototype: `torch.optim.SGD(params, lr=, momentum=0, dampening=0, weight_decay=0, nesterov=False)` # In[34]: ##trainning num_epochs = 3 for epoch in range(1, num_epochs + 1): for X, y in data_iter: output = net(X) l = loss(output, y.view(-1, 1)) optimizer.zero_grad() # reset gradient, equal to net.zero_grad() l.backward() optimizer.step() print(‘epoch %d, loss: %f‘ % (epoch, l.item())) # In[35]: # result comparision dense = net[0] print(true_w, dense.weight.data) print(true_b, dense.bias.data) # In[ ]:
机器学习(ML)系列一之 Linear Regression
标签:fun cat 取数据 随机梯度 put gre sample print The
原文地址:https://www.cnblogs.com/jaww/p/12297848.html