标签:构造方法 添加 new tms 使用 pre alt png 卡住
前面对RF有了基本的认识, 系统关键字和自定义关键字都已搞定, 那么就可以开始来封装自己的库了.
过程并不复杂, 但是容易被一些小问题卡住, 因此, 仔细一点咯
1. 在python安装目录下的 Lib\site-packages目录下 新建一个目录,目录名就是库名,如NewLibrary

2. 在新建的NewLibrary目录下创建一个python文件,任何合法的文件名即可,扩展名为py。如:myclass.py. 内容如下:
#!/usr/bin/env python #-*- coding: utf-8 -*- class MyClass(object): def __init__(self): pass def printMsg(self, msg): print(msg)
上面代码定义了一个python类,其中除构造方法 _init_ 外,还定义了一个printMsg方法,该方法其实就是rf中的关键字,可以直接在rf中使用。方法也可以定义 print_msg, 大小写不用太在意, RF最后都会把这个方法处理成关键字 Print Msg.
3. 在新建的NewLibrary目录下创建__init__.py 文件,文件名必须固定这样。该文件的功能,就是把关键字类暴露出来,让rf能知道。
#!/usr/bin/env python #-*- coding: utf-8 -*- from NewLibrary.myclass import MyClass class NewLibrary(MyClass): ROBOT_LIBRARY_SCOPE = ‘GLOBAL‘
4. 通过前面三个步骤,一个最简单的自定义的NewLibrary库就创建好了,在RIDE中就可以使用了
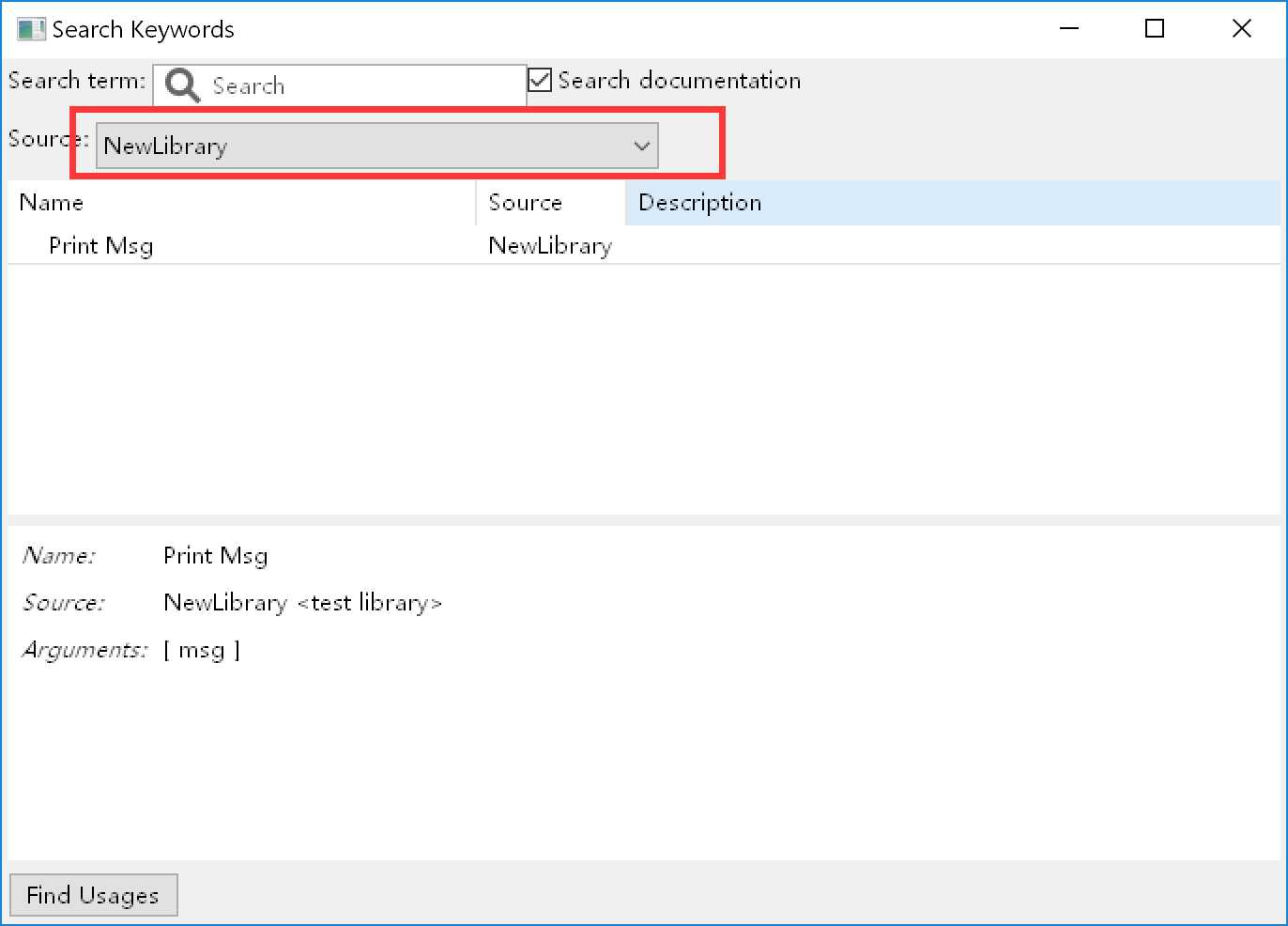
查看关键字
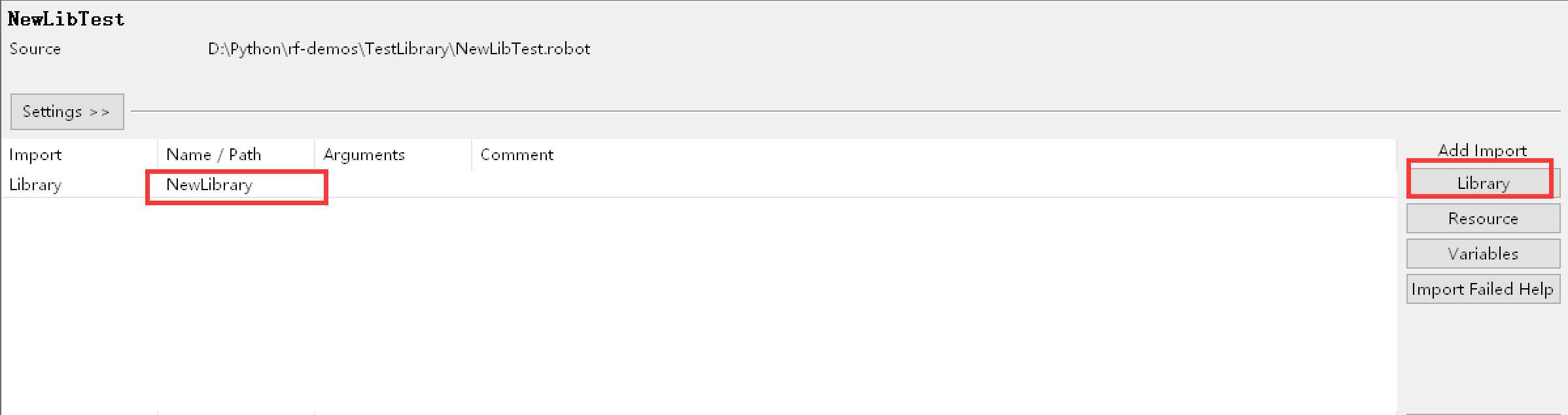
在Suite层级导入关键字, 注意, 导入的关键字必须是黑色才表示导入成功.
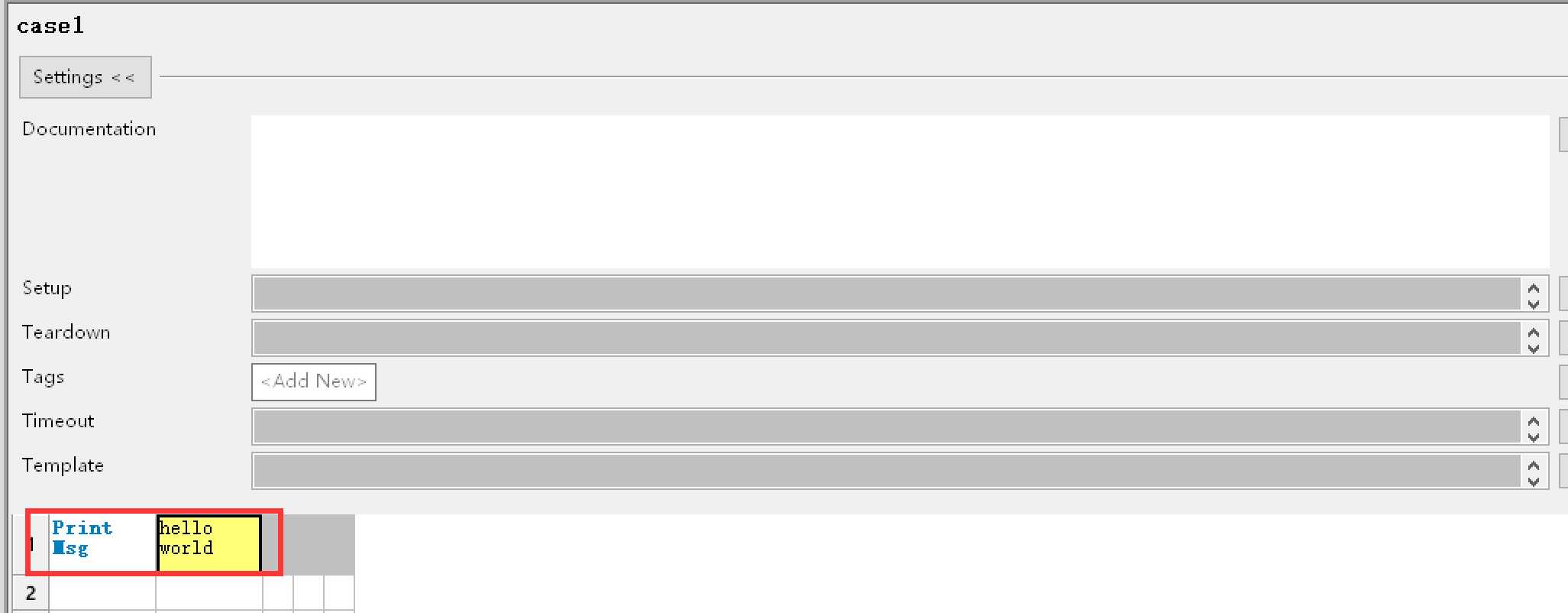
关键字使用:
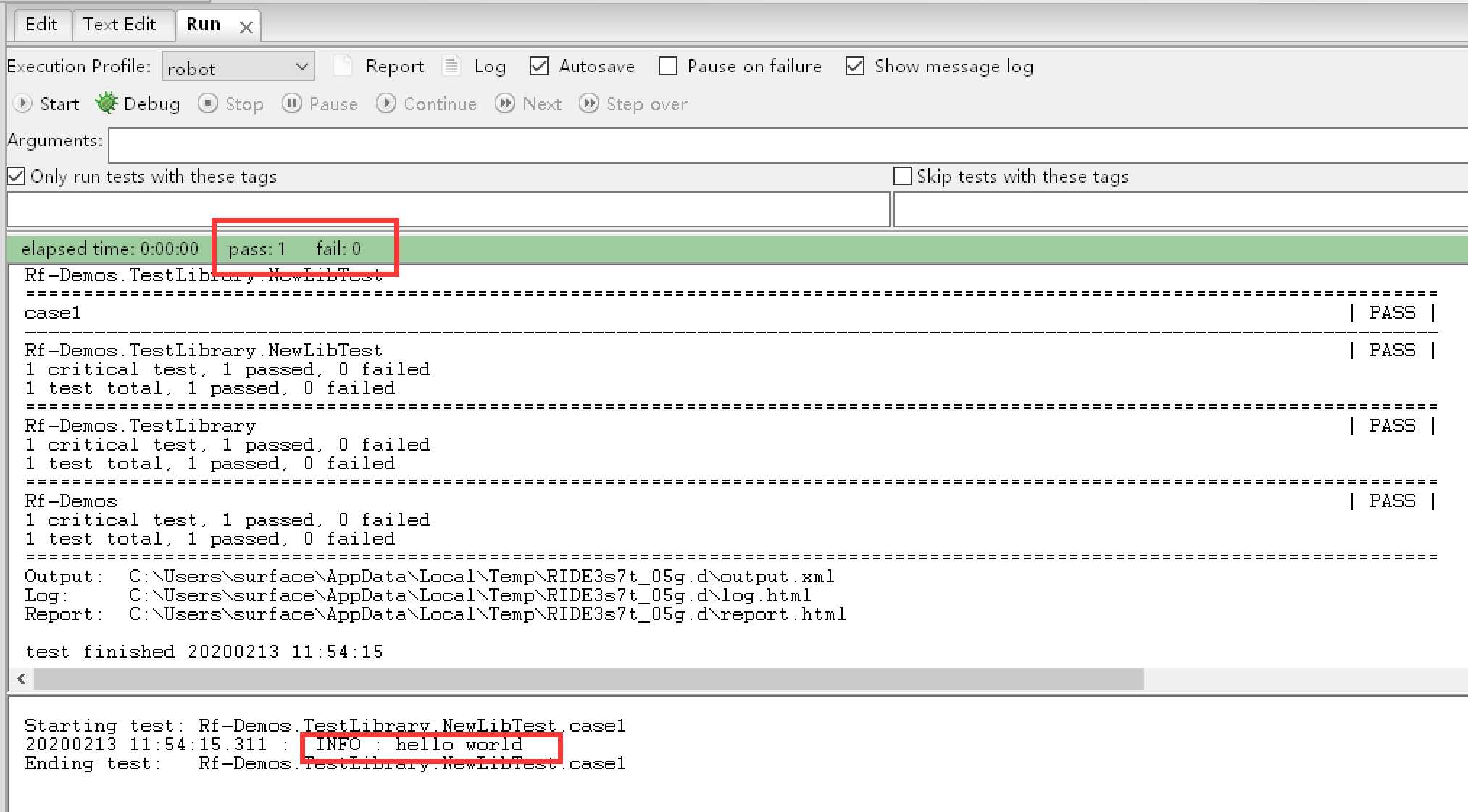
运行结果:
5. 如果还要添加其它的关键字, 请重复以上步骤.
标签:构造方法 添加 new tms 使用 pre alt png 卡住
原文地址:https://www.cnblogs.com/xiaowangzi1110/p/12302991.html