标签:https www mamicode row 二维 for john 线性代数 映射
本文接着上一篇《几何系列】矩阵(一):矩阵乘法和逆矩阵》继续介绍矩阵。
矩阵的转置比较简单,就是行和列互相调换,可以用上标 $T$ 表示某个矩阵的转置。
$$A^T=(b_{ij})$$
其中 $b_{ij}=a_{ji}$。
例如,对于:
$$A=\begin{bmatrix}
1 & 2 & 3\\
4 & 5 & 6
\end{bmatrix}$$
它的转置为:
$$A^T=\begin{bmatrix}
1 & 4\\
2 & 5\\
3 & 6
\end{bmatrix}$$
一些关于转置的公式如下:
$$(AB)^T=B^TA^T$$
$$(A+B)^T=A^T+B^T$$
$$(cA)^T=cA^T$$
$$(A^T)^T=A$$
如果 $AA^T=I$,则矩阵 $A$ 称为正交矩阵。
显然,正交矩阵是可逆的。其逆矩阵 $A^{-1}=A^T$。
如果 $A=A^T$,则矩阵 $A$ 称为对称矩阵。
如果 $A=-A^T$,则矩阵 $A$ 称为反对称矩阵。
行列式(determinant)的概念,最初是用于解决方程组求解的问题。其中比较著名的成果是克莱姆法则。不过随着这个概念的提出,大量关于行列式的理论不断发展,已经远远不止是用于求解方程组这么简单。
从上一篇文章中,我们看待矩阵的视角已经不再局限于大学中过度使用的方程组求解问题的背景,我们开始把它看做是线性变换和几何变换。这种认知可以帮助我们更好地理解行列式的几何意义。
《线性代数的本质 - 05 - 行列式》是非常好的影片,建议读者观看。它已经非常形象地对行列式作了几何意义的可视化,我这里就不再重复。下面简单总结和补充一下。
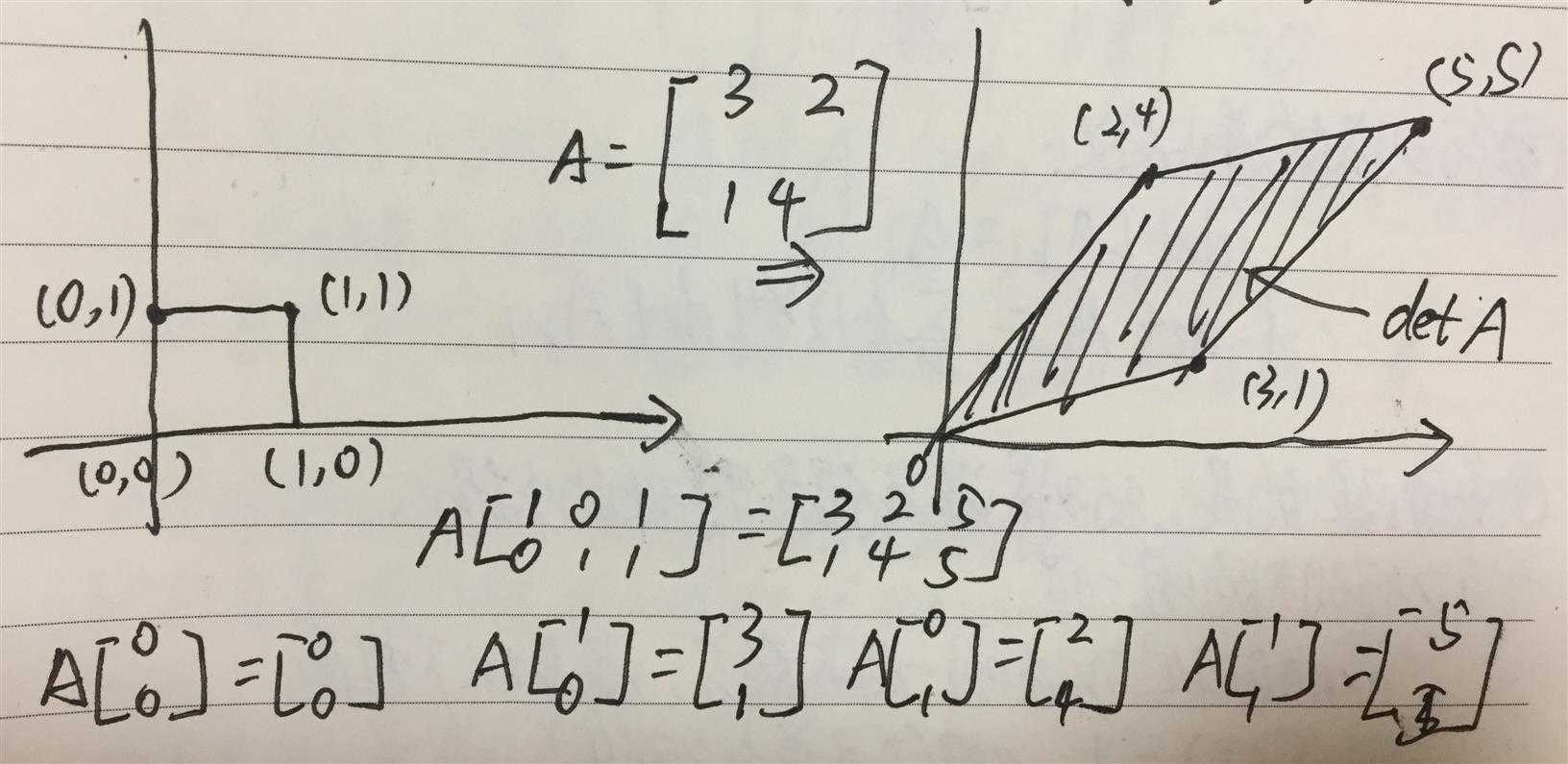
对于 $2\times 2$ 维方阵而言,左乘 $A$ 表示将二维实向量从 $R^2$ 映射到 $R^2$。我们可以想象它作用于一个单位正方形 $S$,使得变换成另一个形状 $S‘$。其变换后的形状 $S‘$ 的面积就等于行列式的绝对值。
行列式如果小于 0,表示 $S$ 的朝向发生了改变。
行列式如果等于 0,表示 $S‘$ 变为了一条线段或者一个点(此时表示变换不可逆,因为再也无法把降维后的线或点变换回原来的矩阵了)。
下面是一个例子:
如果推广到 $3\times 3$ 实数矩,行列式的绝对值等于把体积为 1 的立方体 $V$ 变换后立方体 $V‘$ 的体积。
为什么?
行列式实际上可以体现线性变换或几何变换的“伸缩因子”。如果有一个变换 A,可以把面积为 3 的几何形状 $S$ 变换为面积为 12 的 $S‘$,我们可以肯定这个变换 A(也是方阵)的行列式是 4。如果有一个变换 B,可以把面积为 3 的几何形状 $S$ 变换为面积为 0 的 $S‘$(一条线段),这个变换 B(也是方阵)的行列式就是 0。
相对应的,行列式有一个很重要的乘法性质。
对于任意 $n\times n$ 方阵 $A$ 和 $B$,有:
$$det(AB)=(detA)(detB)$$
其中 det() 表示矩阵的行列式。
这个乘法性质,实际上就体现出了这种伸缩因子累乘的特点。如果 $B$ 变换可以把面积增加 2 倍,$A$ 变换可以把面积增加 3 倍,那么 $AB$ 可以把面积增加 6 倍。
对行列式有了个直观的感受之后,我们再看行列式的定义。
$n\times n$ 矩阵的行列式是从 $R^{n\times n}$ 映射到 $R$ 空间的函数。
$det: R^{n\times n}\rightarrow R$
在具体定义行列式之前,先定义余子式。
如果 $A$ 是 $n\times n$ 矩阵,则定义余子式 $A_{ij}$ 是去除 $i$ 行和 $j$ 列的 $(n-1)\times(n-1)$ 矩阵。
例如,对于
$$A=\begin{bmatrix}
1 & 0 & 3\\
2 & 1 & 2\\
0 & 5 & 1
\end{bmatrix}$$
它的余子式
$$A_{21}=\begin{bmatrix}
0 & 3\\
5 & 1
\end{bmatrix}$$
有了余子式的定义之后,下面是行列式的递归定义:
$$\left\{\begin{matrix}
det\left [ a \right ]=a
\\
detA=\sum_{\nu =1}^{n}(-1)^{\nu+1}detA_{\nu1}
\end{matrix}\right.$$
以下列举一些行列式的重要性质:
1. $det(AB)=(detA)(detB)$。
2. 方阵 $A$ 是可逆矩阵 $\Leftrightarrow detA\neq 0$。
3. 如果 $A$ 可逆,则 $det(A^{-1})=(detA)^{-1}$。
4. $detA=det(A^T)$
建议观看视频《线性代数的本质 - 10 - 特征向量与特征值》,已经提供了这两个概念很好的可视化。
简单地说,作用于几何变换 $A$ 之后($Ax$),很多向量都会改变原来的方向。但是特征向量不会改变方向,只可能发生大小的变化。而这个大小变化的伸缩因子就是该特征向量的特征值。
特征向量可能有多个,可能只有一个,也可能不存在。
一个特例是:
$$A=\begin{bmatrix}
cos\theta &-sin\theta \\
sin\theta & cos\theta
\end{bmatrix}$$
它是旋转矩阵,表示二维空间的旋转变换。此时,所有二维空间下的向量都会产生旋转,即都会改变方向。因此,这个方阵不存在实数的特征向量。
如果 $Ax=\lambda x$,其中 $x\neq 0$,$\lambda$ 是标量,那么 $x$ 就是特征向量,$\lambda$ 是对应的特征值。
特征值和特征向量的计算,可以通过以下公式得到:
$$det(A-\lambda I)=0$$
标签:https www mamicode row 二维 for john 线性代数 映射
原文地址:https://www.cnblogs.com/noluye/p/12266376.html