标签:模型 是什么 lin ax1 助理 文章 das 百度百科 details
1.感知机
感知机是一种二分类的线性分类模型,输入为实例的特征向量,输出为实例的类别{+1,-1}。感知机要求数据集是线性可分的。
按照统计学习三要素模型、策略、算法的顺序来介绍。
2.感知机模型
由输入空间到输出空间的如下函数:
f(x)=sign(ω⋅x+b)
f(x)=sign(ω⋅x+b)
其中ω,bω,b 为模型参数,ω⊂Rnω⊂Rn叫权值(weight)或权值向量(weight vector),b⊂Rb⊂R叫偏置。
感知机模型的假设空间是定义在特征空间中的所有线性分类模型(linear classification model)或线性分类器(linear classifier),即函数集合{f|f(x)=ω⋅x+b}{f|f(x)=ω⋅x+b}.
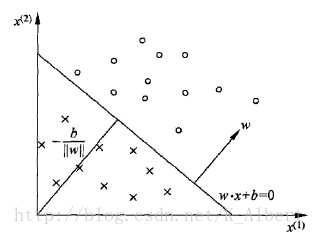
2.1感知机模型的几何解释
线性方程ω⋅x+bω⋅x+b对应于特征空间的一个超平面S,ωω代表超平面的法向量,bb代表截距。这个超平面将特征空间分为两个部分,位于两部分的点(特征向量)被划分为正负两类,所以超平面S被称为分离超平面(separating hyperplane)。
在看几何模型这里有几点疑惑:
1.超平面是什么
2.原点到超平面的距离−b∥ω∥−b‖ω‖(纯属高数忘的差不多了)
2.1.1超平面
百度百科给出的定义:超平面是n维欧式空间中余维度等于一的线性子空间(也就是说超平面的维度为n-1)。这是平面中的直线、空间中的平面之推广。
似乎并没有起到什么帮助理解的作用!这个东西为什么要叫超平面也是很迷!刨除这个蜜汁叫法,还是试图从公式上进行理解吧。
百度到资料一:给定RnRn空间中的一点pp和非零向量n? n→,满足
n? ⋅(x−p)=0
n→⋅(x−p)=0
的点集xx称为经过点pp的超平面。向量n? n→为该超平面的法向量。按照这个定义,一条直线是R2R2空间的超平面,一个平面是R3R3空间的超平面。
老学长解惑:在RnRn空间中的超平面为:
ω? T⋅x? +b=0
ω→T⋅x→+b=0
在几维空间中,向量ω? ,x? ω→,x→就是几维的。当然,ω? ,x? ω→,x→属于该空间。在二维空间下,该方程表示一条直线,直线是平面的超平面。三维空间下,该方程表示一个平面,平面是空间的超平面。
老学长这个解释,我还是比较能接受的。
2.1.2点到超平面的距离
写到这里,我已决心要重看一遍高数。
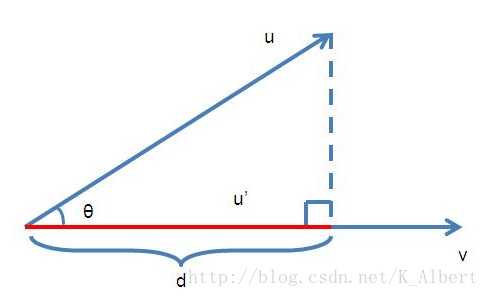
向量的投影:给定两个向量u? ,v? u→,v→,求u? u→在v? v→上的投影长度,向量间的夹角为cosθcos?θ。
算不上推导的推导:
d=|u|⋅cosθ
d=|u|⋅cos?θ
cosθ=u⋅v|u||v|
cos?θ=u⋅v|u||v|
综上,
d=u⋅v|v|
d=u⋅v|v|
点到超平面的距离:假设x? 0x→0是超平面ω? T⋅x? +b=0ω→T⋅x→+b=0上任意一点,则点xx到超平面的距离为x? −x? 0x→−x→0在超平面法向量ω? ω→上的投影长度:
d=|ω? T(x? −x? 0)|∥ω? ∥=|ω? T⋅x? +b−ω? T⋅x? 0−b|∥ω? ∥=|ω? T⋅x+b|∥ω? ∥
d=|ω→T(x→−x→0)|‖ω→‖=|ω→T⋅x→+b−ω→T⋅x→0−b|‖ω→‖=|ω→T⋅x+b|‖ω→‖
2.1.3超平面的正反面
一个超平面可以将该空间分成两部分,和法向量同向规定为正面,和法向量反向称为反面。x? 0x→0是超平面上的一点,x? −x? 0x→−x→0与ω? ω→的夹角小于90。90。时该点位于超平面正面,即
ω? T⋅(x? −x? 0)>0
ω→T⋅(x→−x→0)>0
ω? T⋅x? +b>0
ω→T⋅x→+b>0
3.感知机学习策略
3.1损失函数
误分类集M,对于xi∈Mxi∈M,有−yi(ω⋅xi+b)>0−yi(ω⋅xi+b)>0,感知机损失函数与误分类点到超平面的距离有关。所有误分类点到超平面的距离和为
−1∥ω∥∑xi∈Myi(ω⋅xi+b)
−1‖ω‖∑xi∈Myi(ω⋅xi+b)
忽略1∥ω∥1‖ω‖,就得到了损失函数:
L(ω,b)=−∑xi∈Myi(ω⋅xi+b)
L(ω,b)=−∑xi∈Myi(ω⋅xi+b)
4.感知机学习算法
感知机学习问题转换为求解使损失函数L(ω,b)L(ω,b)最小的最优化问题,采用随机梯度下降法(stochastic gradient descent)。
∇ωL(ω,b)=−∑xi∈Myixi
∇ωL(ω,b)=−∑xi∈Myixi
∇bL(ω,b)=−∑xi∈Myi
∇bL(ω,b)=−∑xi∈Myi
其中M是误分类集
(1)ω=ω0,b=b0ω=ω0,b=b0,学习速率ηη
(2)选择xi∈Mxi∈M,更新ω,bω,b
ωk=ωk−1+ηyixi
ωk=ωk−1+ηyixi
bk=bk−1+ηyi
bk=bk−1+ηyi
(3)转至(2),直到不存在误分类点。
4.1感知机学习算法的收敛性
4.1.1定理
为了便于叙述,令ω^=(ωT,b),x^=(xT,1)Tω^=(ωT,b),x^=(xT,1)T,显然ω^⋅x^=ω⋅x+bω^⋅x^=ω⋅x+b.
假设训练集是线性可分的,则
(1)存在∥ω^opt∥=1‖ω^opt‖=1的超平面,使
yi(ω^opt⋅x^i)≥γ
yi(ω^opt⋅x^i)≥γ
(2)R=max1≤i≤n∥x^i∥R=max1≤i≤n‖x^i‖,则误分类次数k满足
k≤(Rγ)2
k≤(Rγ)2
4.1.2证明
(1)由于训练数据集是线性可分的,所以存在超平面可以将训练数据集完全正确的分开。取此超平面为ω^opt⋅x^i=0,使∥ω^opt∥=1ω^opt⋅x^i=0,使‖ω^opt‖=1.对于数据集中所有的xixi都有
yi(ω^opt⋅x^i)>0
yi(ω^opt⋅x^i)>0
存在
γ=min{yi(ω^opt⋅x^i)}
γ=min{yi(ω^opt⋅x^i)}
使
yi(ω^opt⋅x^i)≥γ
yi(ω^opt⋅x^i)≥γ
(2)ω^k−1ω^k−1是第k次误分类前的权重向量,x^ix^i是使其误分类的点,则有
ω^k=ω^k−1+ηyix^i
ω^k=ω^k−1+ηyix^i
ω^k⋅ω^opt=ω^k−1ω^opt+ηyiω^optx^i≥ω^k−1ω^opt+ηγ≥ω^k−2ω^opt+2ηγ≥?≥ω0+kηγ
ω^k⋅ω^opt=ω^k−1ω^opt+ηyiω^optx^i≥ω^k−1ω^opt+ηγ≥ω^k−2ω^opt+2ηγ≥?≥ω0+kηγ
∥ω^k∥2=∥ω^k−1∥2+2ηyiω^k−1x^i+η2y2i∥x^i∥2
‖ω^k‖2=‖ω^k−1‖2+2ηyiω^k−1x^i+η2yi2‖x^i‖2
由于x^ix^i被ω^k−1ω^k−1误分类,所以yiω^k−1x^i<0,y2i=1yiω^k−1x^i<0,yi2=1,所以
∥ω^k∥2≤∥ω^k−1∥2+η2R2≤∥ω^k−2∥2+2η2R2≤?≤∥ω^0∥2+kη2R2
‖ω^k‖2≤‖ω^k−1‖2+η2R2≤‖ω^k−2‖2+2η2R2≤?≤‖ω^0‖2+kη2R2
当ω^0=0ω^0=0时,
ω^k⋅ω^opt≥kηγ
ω^k⋅ω^opt≥kηγ
∥ω^k∥≤k−−√ηR
‖ω^k‖≤kηR
kηγ≤ω^k⋅ω^opt≤∥ω^k∥⋅∥ω^opt∥⋅cosθ≤∥ω^k∥⋅∥ω^opt∥≤∥ω^k∥≤k−−√ηR
kηγ≤ω^k⋅ω^opt≤‖ω^k‖⋅‖ω^opt‖⋅cos?θ≤‖ω^k‖⋅‖ω^opt‖≤‖ω^k‖≤kηR
k2γ2≤kR2
k2γ2≤kR2
k≤(Rγ)2
k≤(Rγ)2
注意到初始条件为0时,迭代次数k与学习速率ηη无关。
5.感知机的对偶形式
感知机的对偶形式是初始值为0条件下的一种变形,似乎能起到减少每一次迭代的计算量的作用,有待验证。
————————————————
版权声明:本文为CSDN博主「K_Albert」的原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/K_Albert/article/details/78172230
标签:模型 是什么 lin ax1 助理 文章 das 百度百科 details
原文地址:https://www.cnblogs.com/LieYanAnYing/p/12436421.html