标签:文章 变化 sts 关于 四种 尺度 检索 png 解码
CVPR2019论文解读:单眼提升2D检测到6D姿势和度量形状
ROI-10D: Monocular Lifting of 2D Detection to 6D Pose and Metric Shape
论文链接地址:https://arxiv.org/pdf/1812.02781.pdf

摘要内容:
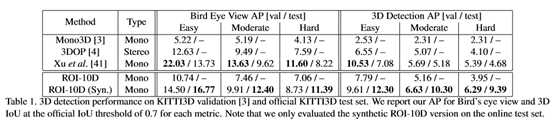
本文提供了基于端到端单目3D目标检测和度量形状检索的深度学习方法。为了在3D中提升2D检测,定位,以及缩放,提出了一种新的loss函数。不同于各自独立的优化这些数量,3D示例允许适当的度量boxes的不一致性。实验结果显示,10维稀疏2D兴趣域Regions of Interests (RoIs)提升在6D姿态和示例纹理几何测量中都取得很好的效果。这也能够通过直接在2D场景上修复恢复的网格来增强数据。对照在KITTI 3D数据上别的单目方案,本文的方案基于官方正规的数据集上,在3D姿态测试结果达到双倍的AP。
1.introduction
文章提出了一种度量精确的单目3D目标检测端对端方法。
主要贡献有三点:
一种度量精确的单目3D目标检测端对端方法,包括一种可微分的2D ROI到3D ROI 提升映射,并提供了用于回归3D box 实例的所有组件;
一种用于在度量空间对其3D box的损失函数,直接优化其关于真值的误差;
扩展模型,将其用于预测度量纹理面片,保证了进一步的3D 推理,包括3D 一致性仿真数据增强。

称该模型为"ROI-10D",将2D ROI提升到3D ROI需要6自由度的位姿参数,3个自由度的空间体积,和一个形状自由度。
2. 用于位姿和形状估计的单目10D提升
分三个部分介绍了方法:
模型结构
用于3D的损失函数
学习得到的度量形状空间,以及如何使用估计的形状参数进行3D重建
2.1 端到端的单目结构
类似于Faster RCNN,首先检测2D区域的proposals,然后为每个proposal region执行分支预测。2D proposals使用了FPN-ResNet34,并使用了focal loss加权。对每个检测到的proposal region使用ROIAlign 提取用于预测分支的特征。
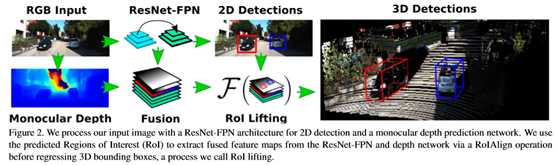
由于信息缺失和重投影模糊,从单目图像中直接回归3D信息是病态、不稳定的。该文献使用了state-of-the-art的SuperDepth 网络预测输入图像中逐像素的深度值。然后将FPN网络输出的特征与深度特征堆积在一起,使用带有Group Normalization 的两个卷积层处理得到融合特征,最后使用检测到的2D bbox和ROI Align在ROI Lifting中提取对应的特征,回归3D旋转、平移、目标的绝对尺度以及目标形状。
2.2 由单目2D实例到6D位姿
该问题其实是一个可微分的提升映射, ,即从一个2D的
,即从一个2D的 到一个3D的bounding box
到一个3D的bounding box  。将旋转编码为4D的四元数,将平移编码为2D物体中心的相对深度。此外,使用到数据集平均体积的偏差描述物体三维体积。
。将旋转编码为4D的四元数,将平移编码为2D物体中心的相对深度。此外,使用到数据集平均体积的偏差描述物体三维体积。
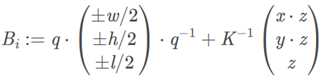
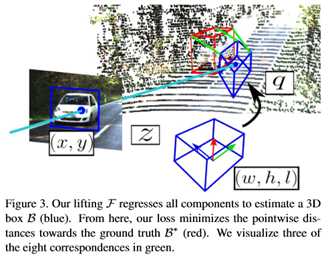
给定一个2D ROI  ,使用ROI Align提取指定区域特征,分别预测出旋转量q,相对于ROI的2D中心(x, y),深度值z和物体的绝对尺度(w, h, l),提升映射为:
,使用ROI Align提取指定区域特征,分别预测出旋转量q,相对于ROI的2D中心(x, y),深度值z和物体的绝对尺度(w, h, l),提升映射为:
?
其中K为相机内参矩阵
损失函数
当仅从单目图像中估计位姿参数时,像素空间中的微小误差可以导致位姿参数的剧烈变化。将问题提升到了3D,并使用了6D自由度的代理损失函数。因此,没有同时对所有预测项进行优化,而是让网络在训练期间自己调整。给定一个3D bbox  和对应的2D检测框
和对应的2D检测框  ,其到3D的提升映射为
,其到3D的提升映射为 ,在度量空间关于八个3D角点的损失函数为:
,在度量空间关于八个3D角点的损失函数为:
在训练过程中,需要一个warm up过程以得到稳定的数值流形。因此训练单个的预测项,直到得到稳定的3D box实例。
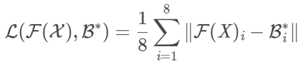
Allocentric 回归 and Egocentric 提升
相机光轴是否对准目标中心,Egocentric 以相机为中心,相机光轴不一定对准目标中心,allocentric是以目标为中心。两者的区别在于当发生与相机之间的位移时,Allocentric中相机光轴随着目标位移而移动,目标的形状变化不大,而Egocentric中相机光轴不变,目标的形状变化较大。
大视场条件下,Allocentric pose estimation很重要。
由于ROI缺少全局的信息,在回归时认为四元数是Allocentric的,然后结合推理出来的平移量矫正为Egocentric,然后提升到3D boxes。
2.3 目标形状学习与检索
介绍了如何将端到端的单目3D目标检测模型扩展到预测三角面片,并用于数据增强。
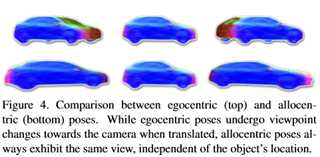
学习一个光滑的形状
给定了50种商用模型,创建了一个映射受限的带符号的距离场 ,大小为128×128×256。首先使用PCA学习低维的形状,实验中发现形状空间很快地偏离了均值。使用PCA生成形状要求评价每一维度的标准差。因此,使用一个3D自编码/解码器 E和D,对输出的TSDF强制不同的约束。E和D都使用了1,8, 16, 32四种卷基层。此外使用核为6的全卷积层作为隐藏层。在训练过程中将所有的隐藏层映射到半球上,以保证连续性。对输出层的跳跃通过总方差进行惩罚,损失函数为:
,大小为128×128×256。首先使用PCA学习低维的形状,实验中发现形状空间很快地偏离了均值。使用PCA生成形状要求评价每一维度的标准差。因此,使用一个3D自编码/解码器 E和D,对输出的TSDF强制不同的约束。E和D都使用了1,8, 16, 32四种卷基层。此外使用核为6的全卷积层作为隐藏层。在训练过程中将所有的隐藏层映射到半球上,以保证连续性。对输出层的跳跃通过总方差进行惩罚,损失函数为:

形状真值的标注
对于3D 提升器的形状分支,预测形状s和形状真值s*间的相似度由两点在半球上的角度决定:

在推理时,预测了低维的隐藏层向量,并将其传递给解码器以得到TSDF表示。
简单面片纹理
模型可以得到目标的尺度与形状,可以投影检索得到的3D面片。将朝向相机的定点映射到图像平面,并赋予相应的值。
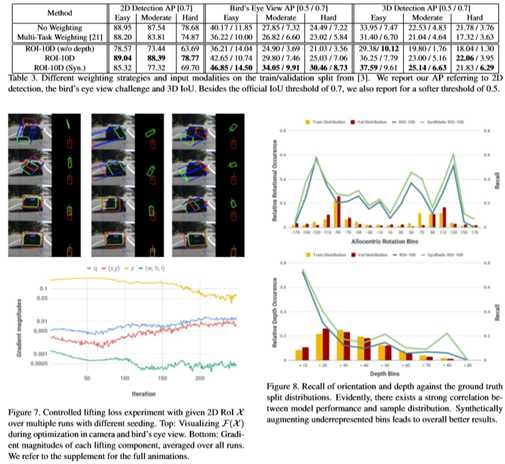
2.4 消融分析
评估新的算法怎样优化极小化loss。另外,证实在KITTI 3D数据集上在哪里和为何如此难以准确评估。最后,分析由于不同的输入以及怎样更好让loss影响姿态的质量。
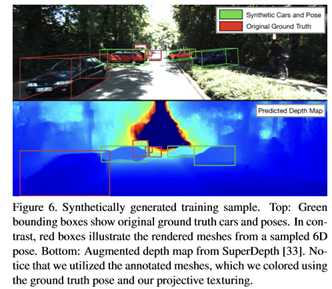
2.5 仿真3D 数据增强
KITTI3D数据集较小,且3D真值获取耗时耗力,采用仿真数据是一种常用方法。文章使用提取得到的面片以生成真实的渲染,而不是写固定的CAD模型。此外,仿真目标的摆放没有太多限制。使用allocentric pose移动目标,不改变视角。
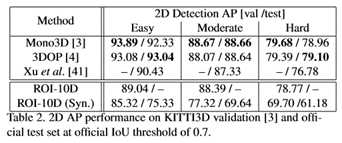
3. 实验

CVPR2019论文解读:单眼提升2D检测到6D姿势和度量形状
标签:文章 变化 sts 关于 四种 尺度 检索 png 解码
原文地址:https://www.cnblogs.com/wujianming-110117/p/12503453.html