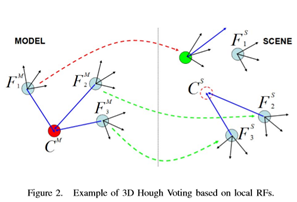
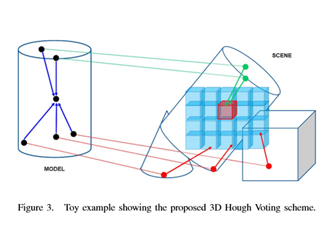
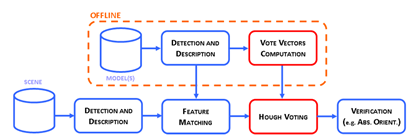
文章“Objectrecognition in 3D scenes with occlusions and clutter by Hough voting”发表在2010年,提出了一个经典的将霍夫投票思想用于三维场景目标识别的方法,在杂乱场景和有遮挡情况下取得了不错的效果。这一思想在近年的文章中被多次引用,一些深度学习的方法也有该投票思想的影子。该方法已在PCL库中有简易实现。一、算法框架算法借助点云三位特征描述子,计算出一系列的模型点和场景点的匹配对,同时每一个模型特征点和模型形心都有一个相对位置关系,因此与此模型特征点相匹配的场景特征点能够对应出一个形心的位置,由此位置信息在霍夫空间内对相关参数进行投票。此外文章建立特征点处的局部坐标系,这能使得特征具有旋转不变性和平移不变性,不论在场景中还是模型中,对于同一特征点的局部坐标系是唯一的。方法分为线上、线下两个阶段,具体如图:
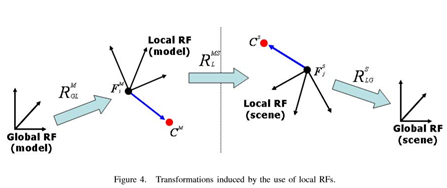
二、局部特征描述子与局部坐标系构建该方法主要针对的是点云特征局部描述子。在线下阶段,对模型进行采样,提取关键点,计算关键点的局部特征描述子(如SHOT描述子),并计算关键点处局部坐标系。局部坐标系的估计方法可使用主成分分析法。在线上阶段,首先对场景点云提取特征点,计算特征点的局部特征描述子,同时构建场景特征点的局部坐标系。借助k-d tree 搜索,找到模型描述子和场景描述子的特征点匹配(匹配原则可以基于两描述子的欧氏距离,设定阈值)。三、目标识别——霍夫投票取模型质心作为参考点,对于每一个特征点,计算模型世界坐标系下的
[1]Tombari F , StefanoL D . Object Recognition in 3D Scenes with Occlusions and Clutter by HoughVoting[C]// 2010 Fourth Pacific-Rim Symposium on Image and Video Technology.IEEE Computer Society, 2010.
 :
: