标签:误差 row 数据采集 启用 park boost 测量 控制 碰撞检测
APA自动泊车系统
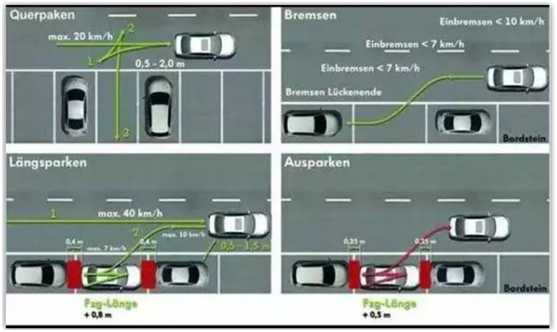
1. 半自动泊车
自动泊车又称为自动泊车入位,它对于新手来说是一项相当便捷的配置,对于老手来说也省了些不少力气。那么自动泊车的原理是什么呢?能想怎么停就怎么停,想停哪儿就停哪儿吗?下面咱们就来说道说道。
有什么用?
该系统能自动帮驾驶者将车停入甚至驶出车位,无需自己打方向。
有什么优点?
自动泊车对于新手来说是一项相当便捷的配置,对于老手则是省了不少力气。此外,该系统还可避免因停车不注意发生的剐蹭。
各品牌车型自动泊车系统的操作方式及启用条件都不尽相同。
树叶、废弃物或冰雪盖住路沿时,驻车转向辅助系统可能很难识别到路沿。此外树叶和冰雪还会造成超声波信号反射时严重散射,使系统接收到可能导致出错的弱超声回波。
如果空位上有尺寸较小的警示柱等障碍,系统可能会识别不出而把该空位作为有效的停车位,车速降低有助于提高系统识别空位中小尺寸物品的可能性。
在自动泊车过程中仍会有声音提示驾驶员可能发生的碰撞。
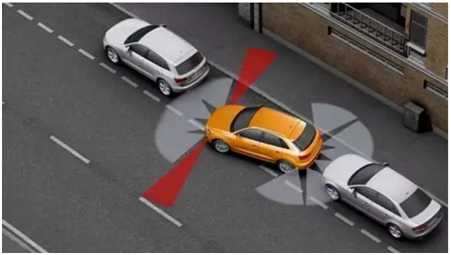
自动泊车的技术原理是什么?
遍布车辆周围的雷达探头测量自身与周围物体之间的距离和角度,然后通过车载电脑计算出操作流程配合车速调整方向盘的转动。
该系统包括环境数据采集系统、中央处理器和车辆策略控制系统,环境数据采集系统包括图像采集系统和车载距离探测系统,可采集图像数据及周围物体距车身的距离数据,并通过数据线传输给中央处理器。
中央处理器可将采集到的数据分析处理后,得出汽车的当前位置、目标位置以及周围的环境参数,依据上述参数作出自动泊车策略,并将其转换成电信号。
车辆策略控制系统接受电信号后,依据指令作出汽车的行驶如角度、方向等方面的操控,直至停车入位。
不同的自动泊车系统采用不同的方法来检测汽车周围的物体。有些在汽车前后保险杠四周装上了感应器,它们既可以充当发送器,也可以充当接收器。这些感应器会发送信号,当信号碰到车身周边的障碍物时会反射回来。然后,车上的计算机会利用其接收信号所需的时间来确定障碍物的位置。其他一些系统则使用安装在保险杠上的摄像头或雷达来检测障碍物。但最终结果都是一样的:汽车会检测到已停好的车辆、停车位的大小以及与路边的距离,然后将车子驶入停车位。
2. 全自动泊车
全自动泊车辅助系统APA(Auto Parking Assist),通过控制车辆的加减速度和转向角度自动停放车辆。该系统通过AVM(环视)和USS(超声波雷达)感知泊车环境,使用IMU和车轮传感器估计车辆姿态(位置和行驶方向),并根据驾驶员的选择自动或手动设置目标泊车位。然后系统进行自动泊车轨迹计算,并通过精确的车辆定位与车辆控制系统使车辆沿定义的泊车轨迹进行全自动泊车,直至到达最终目标泊车位。
系统简介
全自动泊车辅助系统APA(Auto Parking Assist),通过控制车辆的加减速度和转向角度自动停放车辆。该系统通过AVM(环视)和USS(超声波雷达)感知泊车环境,使用IMU和车轮传感器估计车辆姿态(位置和行驶方向),并根据驾驶员的选择自动或手动设置目标泊车位。然后系统进行自动泊车轨迹计算,并通过精确的车辆定位与车辆控制系统使车辆沿定义的泊车轨迹进行全自动泊车,直至到达最终目标泊车位。
当USS在车辆到达目标点之前检测到障碍物,APA处理来自AVM和USS的信号,并预计会发生碰撞时,APA在自动泊车期间对车辆施加适当的减速。
科技APA全自动泊出系统主要功能如下:
|
功能 |
说明 |
|
车位识别 |
包括无车位标记、边界车、路缘等确定的车位及有车位标记的车位 |
|
自动泊入 |
包括平行泊入、垂直泊入、斜列式泊入 |
|
自动泊出 |
包括平行泊出、垂直泊出、斜列式泊出 |
|
防碰撞 |
碰撞检测、预警、制动 |
|
HMI |
包括驾驶员操控及声音、UI指示/提示 |
泊车车速定义要求:
|
车速定义 |
搜索车速 |
车速大于>30km/h, 进行APA无效提醒 |
|
车速≤15km/h,搜索图像和空间车位 |
||
|
15km/h<车速≤30km/h搜索空间车位 |
||
|
泊车车速 |
全自动控制泊车车速,最高泊车车速≤7km/h |
|
|
车速>7km/h,退出APA |
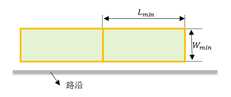
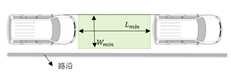
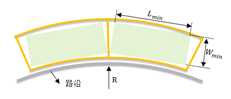
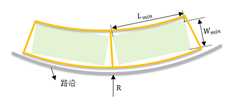
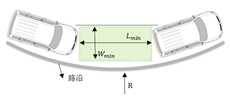
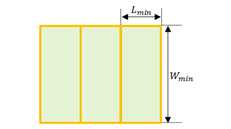
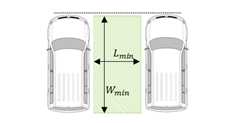
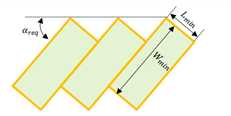
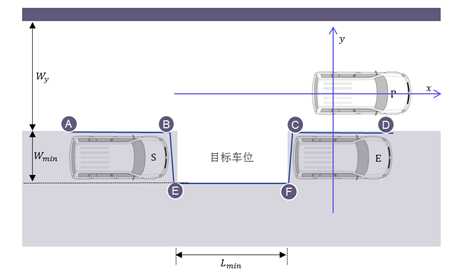
使用科技APA泊车只限于产品支持的车位类型,以下是具体支持的车位概述,示意图通过最小水平长度和最小垂直宽度定义泊车位。另外,为道路路沿的凸半径(或凹半径),对于倾斜泊车,使用倾角来定义,它定义为泊车基准线与泊车位之间的夹角。
|
名称 |
示意图 |
||
|
平行泊车位 |
1 |
|
|
|
2 |
|
||
|
3 |
|
||
|
4 |
|
||
|
5 |

|
||
|
6 |
|
||
|
垂直泊车位 |
1 |
|
|
|
2 |
|
||
|
倾斜泊车位 |
1 |
|
|
|
3 |

|
||
|
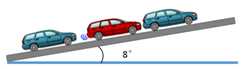
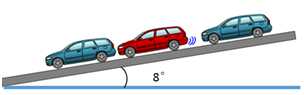
坡道车位 |
1 |
|
|
|
2 |
|
||
硬件原理设计
APA要完成泊车功能,APA ECU除了需要环视摄像头和超声波雷达感知环境,还需要与车身纵向和横向控制系统密切配合,以下是APA相关的车身CAN网络拓扑:
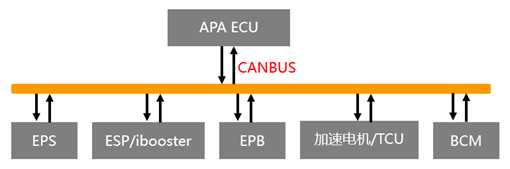
车身CAN拓扑
完成自动泊车功能,需要整车的档位、EPS、ESP/ibooster、加速、EPB、APA开关及指示灯等控制器或传感器支持:
1.
泊车控制系统通过超声波雷达及360环视信息融合泊车车位。
2. 通过APA ECU算法规划泊车轨迹。
3. 获取轮速脉冲及IMU信号,推算车辆航迹。
4. 获取EPS转向角、车速、档位等信号,用于定位融合及速度控制。
5. 根据轨迹规划结果,对车辆的档位、速度、方向盘转向角进行控制,完成车辆泊入泊出。
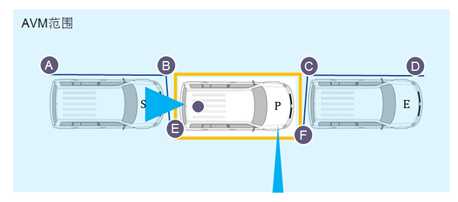
APA全自动泊车辅助系统采用12颗超声波雷达、4个环视摄像头和一个控制器构成,实现全自动泊车功能。
软件功能设计
科技APA全自动泊车辅助系统,可以帮助驾驶员安全泊车。
开启泊车功能可以通过物理按键(泊车辅助按钮)激活,也可以通过中控显示屏的自动泊车按钮激活,例如打开中控显示屏(IHU)驾驶辅助功能界面,泊车辅助功能界面分为工具栏、泊车操作区域、搜索车位提示区域、全景图像显示区域,如下图:

车位搜索:系统根据车身AVM和LRU传感器探测搜索车位,系统默认搜索右侧停车位,如需搜索左侧停车位,可以打左转向灯即可,车位识别采用AVM和LRU融合的方式。
|
AVM车位搜索 |
LRU车位搜索 |
融合结果 |
||
|
搜索到车位 |
未搜索到车位 |
AVM车位 |
||
|
搜索到车位 |
在AVM识别范围内 |
与AVM车位重叠 |
AVM车位 |
|
|
不与AVM车位重叠 |
LRU车位 |
|||
|
不在AVM识别范围内 |
AVM车位 |
|||
|
未搜索到车位 |
LRU车位 |
|||
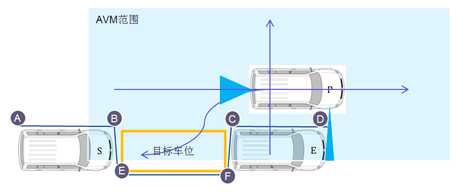
自动泊入:当识别到车位后,系统会提示停车,接着会请求用户点击自动泊入开关,点击自动泊入开关后,系统会提示驾驶员松开刹车开始泊车并长按APA硬按键,然后系统自动规划路径,并控制车辆完成泊车。
且看平行泊入,平行泊车位搜索完成后,APA将建立电子地图。
平行泊车电子地图
APA基于电子地图进行路径规划,路径规划问题可描述为寻求一条满足多个约束的路径曲线。
平行泊车轨迹规划
基于规划的轨迹,APA进行泊车实时控制,主要包括泊车环境实时监测、车辆位置估计、车身实时横纵向控制。
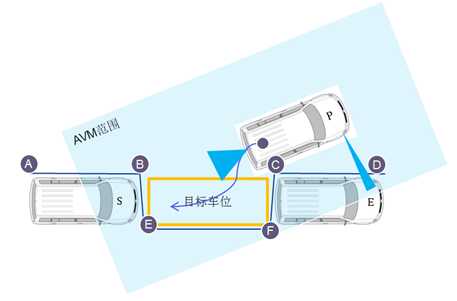
平行泊车过程中
如果实际的最终位置满足在x与y方向参数指标,则认为自动泊车正确完成(若与参考路沿对齐,则前后车轮与参考路沿的距离为25±10cm)
平行泊车完成
自动泊出
APA支持从泊车位自动泊出,驾驶员需要在自动泊出开始之前,使用转向灯指示泊出方向。其中Df和Dr是车辆到最近的前部和后部物体的距离。
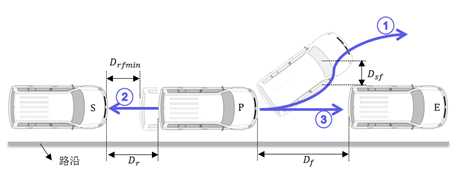
平行泊出的初始条件
若与前侧参考车辆(障碍)距离符合安全距离要求,则按方式①直接前进驶出,若小于1步驶出的安全距离,则按方式②,第1步自动驶出动作默认为倒退。
平行泊出的结束条件
基于SRU的测量,车辆来回移动,直至自动驶出结束。自动驶出完成的评价标准为:当前车辆方向盘角度保持不变即可驶出泊车位并且在当前雷达探测范围内保持该线路行驶无障碍冲突。如果该过程在行驶方向角度变化达到以前没有正确结束,则APA会确定前方有障碍物,并通知停止自动泊出
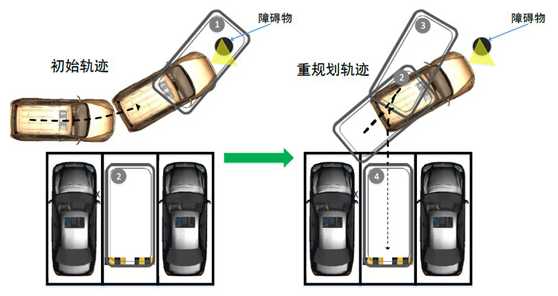
泊车路径重新规划
在泊车入位过程中,车辆行驶的轨迹上可能会出现动态障碍物或静态障碍物,若行驶路径上存在静态障碍物,则需要重新对泊车路径进行规划。
如下图示例所示,车辆开始泊车后,泊车系统规划步数为两步泊入,且此时因各种原因(超声波探测距离、AVM未识别)未能识别到前方障碍物。当车辆在第一步泊入操作时US检测到前方静态障碍物,此时泊车系统根据车辆当前位置、障碍物信息、车位信息等条件,重新规划泊车路线(可能造成泊车步数增加),完成车辆的泊入。
如下图示例所示,对于内部有停车带的车位,在泊入过程中,车辆撞上减速带后(SVM未识别情况下),泊车控制系统根据发动机扭矩、轮速脉冲等信号,内部判断是否遇到减速带,并会重新规划泊车路径(可能造成泊车步数增加),在避免车辆越过减速带的前提下完成泊车。

定位与控制
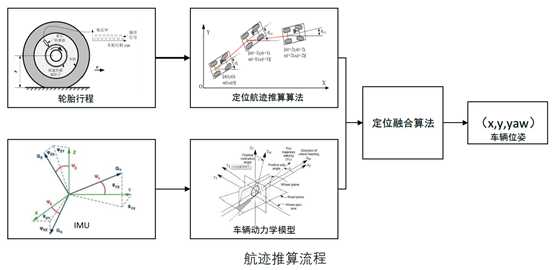
泊车过程中的车辆运动姿态估计,属于短行程高精度的定位问题。采用车轮脉冲信号进行航迹推算来定位。通过单位时间内左右轮运动行程来计算车身方位角增量和后轴中心位置的增量,分别对车身方位角和位置的增量进行累加,可得出车辆的相对起始状态的位姿。
航迹推算算法适用于短行程车辆位姿定位,但该方法存在一些误差。所以需要结合其他方法共同来定位。本方案采用了结合IMU及车辆动力学模型,通过位置估计算法计算短时内高精度位姿变化,通过定位融合算法计算出最终的车辆位姿,其方法流程如下图所示:
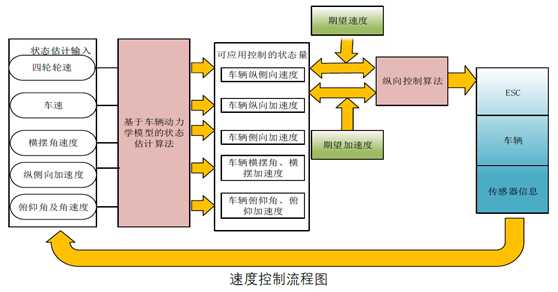
通过车辆传感器获取的信息进行滤波,结合车辆动力学模型将传感器信息的输入应用非线性状态估计算法进行车辆状态估计,获取基于车辆动力学模型较为准确的状态信息(也就是将传感器采集的状态信息进行补偿),构建两个闭环系统进行速度控制,一部分是加减速度控制环(ESC自带),另一部分是速度控制环。
标签:误差 row 数据采集 启用 park boost 测量 控制 碰撞检测
原文地址:https://www.cnblogs.com/wujianming-110117/p/12635750.html