标签:视图 配套 链接 区域 一起 了解 操作系统 千兆 汽车
相关链接:https://www.forlinx.com/article_view_44.html随着我国城市化进程的加快发展,人口越来越集中,城市交通四通八达,车辆也在逐年增多。公交车成为城市交通的重要组成部分,也是城市通勤的必要交通工具。但日益拥堵的交通现状给大型车辆的驾驶员带来很多困扰,比如公交车追尾事件、倒车盲区、狭窄道路通行等情况。
一直以来为了解决这些问题,也出现了很多相关的解决技术,比如:语音提示、倒车雷达系统、可视雷达系统、倒车影像、2D 360°环视技术,直到现在公交车辆上应用的3D 360°环视技术。
3D 360°全景影像系统简介
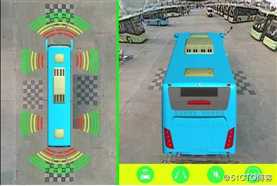
全景影像系统又叫360°全景影像系统,或简称MVCS(MulTI-View Camera System)。通过在汽车周围架设4到8个广角摄像头,做到全部覆盖车辆周边所有视场范围。对车辆前后左右的同一个时刻图像进行采集,再把采集来的数据经过视频合成、视角转化、图像拼接、增强之后,转换成360度的车身俯视图,并在中控台的屏幕上显示,极大的提升了驾驶的安全性和便捷性。
一、 公交车应用

通过中控台的显示,驾驶员可以非常清楚的了解到车辆在驻车前行、左转向灯、右转向灯、倒车、中门的周围的环境,配合标尺线能够准确读出障碍物的位置和距离,减少车辆追尾、倒车盲区、狭窄道路通行等情况。
二、拖挂车应用
拖挂车一般由主车和挂车两部分构成,主车负责牵引,挂车负责承载功能,其中间通过牵引桥连接在一起,车辆在转弯的时候,主车和挂车之间夹角范围可达到90°以上。相对于公交车,拖挂车车身更长,车辆之间的拖挂是非刚性连接的,导致拖挂车在转弯、倒车等驾驶上更加容易出现交通事故。所以拖挂车作为大型货运车辆的代表,更需要360°全景影像技术的支持。

如下图所示,挂车会随着弯道以及车辆速度发生不断的变化,黄色是迁移车的轨迹,橙色是整个挂车的轨迹。橙色区域就是一个死亡月牙状的盲区,非常容易导致事故发生,同时车辆右侧后半部分也处于完全性的盲区。以往驾驶员在驾驶过程中,通常要利用多种方式对车外复杂的盲区进行反复的动态观测,来估计挂车的行驶区域,从而对牵引车进行操控。
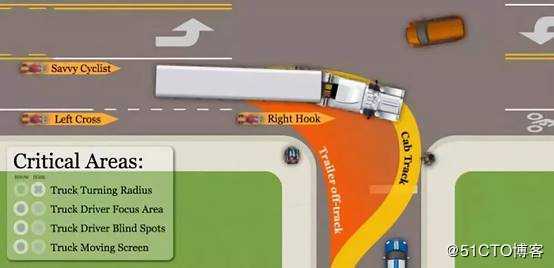
但通过360环视技术可以非常方便的给驾驶员提供车辆周围的信息,通过分布在主车和挂车四周的摄像头,配合雷达系统、传感器系统,来动态调整每个摄像头的成像,在转弯、倒车等场景中对驾驶员起到非常重要的辅助作用。
在全景视图中通过绘制轨迹线,并对轨迹内的区域进行检测、预计,实时动态的反馈给到驾驶员,极大降低了驾驶员的操控难度,驾驶员能更从容的操控车辆泊车入位或通过复杂路面,有效减少刮蹭、碰撞、陷落等事故的发生。

三、高稳定性的360°环视解决方案
可以通过I.MX6Q处理器加多路模数转接芯片来实现。其中核心处理器采用FETMX6Q-C核心板,多路模数转接芯片采用1转4摄像头的TW6868芯片,Android操作系统,配合倒车雷达等车辆技术,来实现360°全景的ADAS功能:2D全景、3D全景、车道偏离报警、盲区报警、行车记录、动态倒车轨迹、等盲区检测系统。

其中FETMX6Q-C核心板为飞凌基于NXP四核ARM Cortex-A9架构i.MX6Quad高性能处理器设计,主频1GHz,整板尺寸小巧仅40mm*70mm,12层PCB沉金工艺。采用四个高度为1.5mm的超薄连接器,引脚数量多达320PIN,将处理器全部功能引脚引出, 亦可满足各个领域不同产品的不同功能需求。
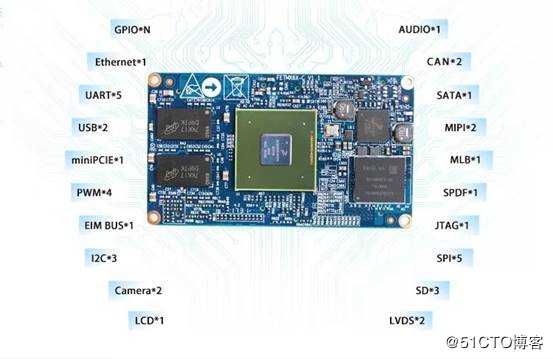
同时提供接口丰富的配套底板,不仅搭载千兆以太网、CAN-bus、摄像头、WIFI&蓝牙等主流接口,还引出了MIPI、MLB、EIM BUS等CPU特有的功能。可帮工程师轻松实现前期的评估、测试、开发,更快速的设计出更具有竞争力的产品。

标签:视图 配套 链接 区域 一起 了解 操作系统 千兆 汽车
原文地址:https://blog.51cto.com/14771134/2490100