标签:发展 小车 性能 分类 国外 驾驶 src 实现 交通事故
ADAS测试
1. ADAS?和?自动?驾驶?测试
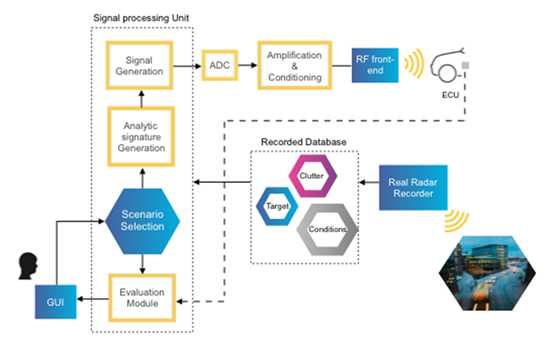
AD?和?高级?驾驶?辅助?系统?(ADAS)?正在?不断?增加?新的?雷达、?摄像?头、?激光?雷达?和?GNSS?传感器,?甚至?也在?改变?架构?和?技术。?面对?这些?快速?变化?的?技术,?工程?师?亟需?灵活?的?测试?系统?来?快速、?安全?地?部署?产品。
随着?当今?的?停车?辅助?传感器?和?备用?摄像?头等?个人?安全?功能?不断?升级,?自动?驾驶?系统?也?从?L2?逐步?升级?至?L3、?L4 +,?测试?系统?当然?也?必须?随?之?进化?来?适应?新的?需求。?未来?安全?关键?型?驾驶?辅助?系统?和?自动?驾驶?汽车?需要?灵活?的?测试,?以?实现?快速?创新,?同时?不会?影响?测试?严格?性?或?效率。?NI?为?ADAS?和?AD?测试?提供?了?一种?灵活?的?平台?化?方法。?借助?NI?软件?定义?的?平台,?您?可以?集成?测试?未来?车辆?所需?的?所有?I/?O?类型。?因此,?您?只需?使用?一个?测试?平台,?即可?完成?ADAS?和?自动?驾驶?系统?的?特性?分析、?验证?和?确认,?甚至?是?生产?测试。?由于?这些?灵活?的?系统?基于?开放?且?可?复?用?的?硬件?和?软件,?因而?不仅?可?确保?测试?数据?的?准确?性,?而且?还?可?轻松?集成?到?您?目前?使用?的?工具?和?工作?流程?中。

了解?NI ADAS?解决?方案?如何?通过?集成?所有?类型?的?I/?O?来?帮助?您?测试?未来?的?ADAS?技术。?主题?包括:
ADAS测试是必不可少的部分,然而我国相关测试标准还处于落后阶段。因此,在制定标准过程中,应基于中国交通事故数据提炼测试场景,并结合车辆技术特点设计测试案例、制定限值,以提高我国高级驾驶辅助系统测试场景的发展。
2. 国内外现状
对于高级驾驶辅助系统而言,国内外纷纷成立专业小组开展智能网联汽车或者自动驾驶车辆标准制定工作。UNECE的WP.29于2018年6月成立“联合国智能网联法律工作组”,专门从事智能网联汽车的相关工作。国际标准组织ISO成立TC22和TC204,分别负责道路车辆和智能交通系统,其规定的标准值是最低标准,并且还未对智能网联汽车的相关性能做出规定。中国的全国汽车标准化技术委员会成立了智能网联汽车分标委,专门从事相关标准制定工作。另外,还有SAE、E-NCAP、JT/T等非利益团体在制定或已制定更加严苛的标准法规。
目前,国内外已经针对高级驾驶辅助系统出台了若干个相关标准,主要面向碰撞预警系统FCW、车道偏离预警系统LDW、主动紧急制动系统AEB、车道保持系统LKA、自适应巡航系统ACC等辅助功能。但是,面向同一个高级辅助功能,不同标准规定的测试场景略有不同。
3. 测试场景分析
(1)前向碰撞预警系统和自动紧急制动系统
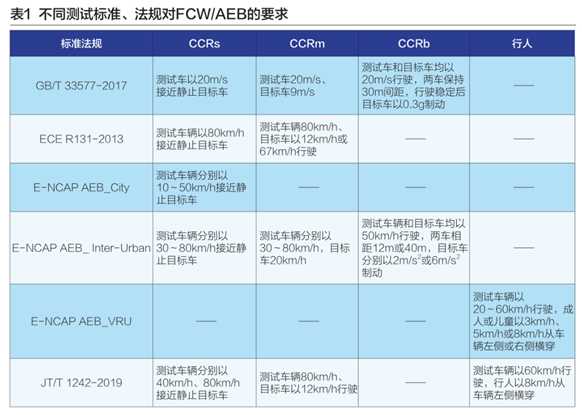
前向碰撞预警系统FCW和自动紧急制动系统AEB在车辆纵向进行预警或干预,提醒或辅助驾驶员控制车辆纵向参数。根据城市道路行驶工况特点,FCW和AEB的测试场景主要分为车车测试和车人测试。由于车车追尾事故是道路上最常见的事故之一,因此车车测试分为前车静止场景CCRs、前车低速行驶场景CCRm和前车制动场景CCRb。车人测试主要描述的是车辆与交通弱势群体的关系,交通弱势群体指的是行人、自行车者等道路使用群体。
GB/T
33577-2017、ECE R131-2013、E-NCAP
AEB_C2C、E-NCAP AEB_VRU、JT/T
1242-2019等法规、标准分别给出了FCW、AEB的测试场景,具体测试要求见表1。
(2)车道偏离预警系统LDW和车道保持系统LKA
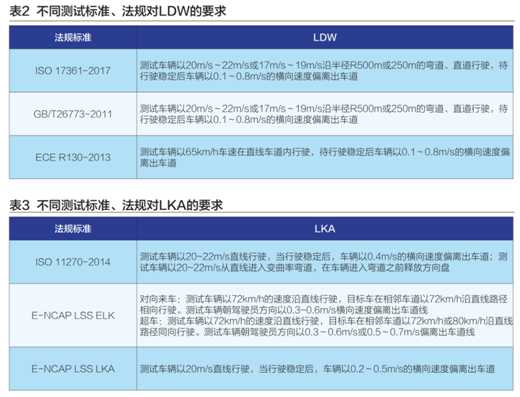
车道偏离预警系统LDW和车道保持系统LKA在车辆横向进行预警或干预,提醒或辅助驾驶员控制车辆横向参数,以提示或防止车辆偏离出原行驶车道。由于道路车辆偏离是单车事故和前碰撞的主要原因,因此ISO 17361-2017、ISO 11270-2014、GB/T 26773-2011、ECE R130-2013、E-NCAP LSS等标准法规对LDW和LKA做出了相关规定,具体见表2、表3。
(3)自适应巡航系统ACC
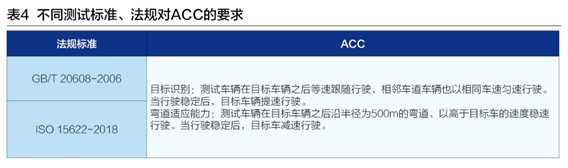
自适应巡航系统通过控制本车发动机或传动系统、制动器与前车保持适当的距离,以此减轻驾驶员的负担。ACC系统包括两种级别:全速自适应巡航控制(FSRA)和限速自适应巡航控制(LSRA)。FSRA可以通过控制本车发动机和(或)传动系统、制动器至车辆停止以实现与前车保持适当距离的目的,而LSRA通过控制本车发动机和(或)传动系统、制动器,使车速大于某一最小车速,以实现与前车保持适当距离的目的。目前,ISO 15622-2018、GB/T 20608-2006均对ACC的测试工况做出相应的规定,具体见表4。
(4)测试场景分析
通过对比不同测试标准、法规的测试场景,可以看出当前国内标准几乎等效采用国外标准,且更新速度较慢。
1.测试条件更为苛刻,测试场景更加危险
以FCW测试场景为例:在实际测试中,货车、客车的前向碰撞预警通常采用JT/T
883-2014《营运车辆行驶危险预警系统技术要求和试验方法》,其中CCRb的测试工况为测试车辆和目标车均以20m/s行驶,两车保持30m间距;当行驶稳定后,目标车以0.3g制动。而在针对乘用车的E-NCAP AEB法规中,FCW的测试工况为测试车辆和目标车均以50km/h行驶,两车相距12m或40m,目标车分别以2m/s2或m/s2制动。两辆营运车辆以高速行驶、并保持较小的车间距离,驾驶员不仅要保证测试精度,还要时刻做好接管车辆的准备以防止发生碰撞。可以看到,国标的测试条件更为苛刻,测试场景更加危险。
2.标准更新较慢
以ACC为例,在近几年时间里,ISO 15622已经迭代了2002版、2010版和2018版等3个版本。值得注意的是, ISO 15622-2018增加了ISO 22179:2009全速自适应巡航控制系统的性能要求和测试方法、取消了弯道分类及相关条文、不再禁止系统从“保持状态”自动启动,并且驾驶员能够通过车载设备控制系统(设置车速建议),提高了标准的可读性和可操作性。而国内关于ACC的测试标准依旧为引用ISO 15622-2002版本的GB/T 20608-2006,并且近几年没有开展新的修订工作。
4. 建议
根据上述分析,在设计场景测试案例或者制定相关标准时,应综合考虑国内车辆技术状况、道路设施条件等因素。
(1)应结合车辆特点设计测试案例、制定限值
我国车辆类型丰富多样,应结合车辆技术特点设计测试案例、制定标准限值,这有助于提升测试安全,提高高级驾驶辅助系统功能测试准确度。例如,针对危险货物运输车的FCW测试,应根据最高车速不大于75km/h、加速距离长、运输货物性质等车辆特点,设计更加合理的测试场景,并且在安全范围内制定合理的标准限值,既保证车辆高级驾驶辅助系统的功能又提高测试安全。
(2)应定期更新标准,自我迭代完善测试场景
通常,国内标准滞后于国际技术的发展水平,常常通过行业标准、团体标准或者企业标准来提高系统功能。这主要是因为国际标准在制定标准时几乎滞后于当前的技术发展,而国内标准倾向于等效采用或非等效采用国际标准。目前,E-NCAP已经推出2020年的测试规程,引领行业不断进步。因此,我国应实时跟踪新技术进展和国际标准动态,结合国内技术发展水平,提前部署标准修订工作,通过自我迭代完善测试场景。
(3)基于中国交通事故数据提炼测试场景
在高级驾驶辅助系统标准中,我国在引用国外标准时几乎没有根据国情修改测试工况或测试场景,无法体现我国特殊的交通状况特点。因此,我国在制定相关标准时,应以中国交通事故数据为基础,提炼符合国情的测试场景,并不断通过验证完善测试案例,提高车辆性能安全。
5. 结论
测试场景是高级驾驶辅助系统测试中必不可少的部分,然而我国相关测试标准还处于落后阶段。在制定标准过程中,应基于中国交通事故数据提炼测试场景,通过定期更新实现自我迭代,并结合车辆技术特点设计测试案例、制定限值,我国高级驾驶辅助系统测试场景将会趋于成熟。
标签:发展 小车 性能 分类 国外 驾驶 src 实现 交通事故
原文地址:https://www.cnblogs.com/wujianming-110117/p/12773559.html