标签:hub 完全 tps 带来 产生 化学 估计 流程 returns
在很多应用场景中,马尔可夫决策过程的状态转移概率 \(p(s^ {\prime}|s,a)\) 和奖励函数 \(r\left( {s,a,s^{\prime}} \right)\) 都是未知的。这种情况一般需要智能体与环境交互,然后收集一些样本,然后再根据这些样本来求解最优策略,这种基于采样的学习方法称为模型无关的强化学习 \([1]\).
蒙特卡罗法通过对若干个完整的状态序列(episode)采样以获取大量的经验数据,从而来估计真实的状态值函数 \({v_\pi }\left( s \right)\).
在马尔可夫决策过程中对状态值函数 \({v_\pi }\left( s \right)\) 的定义为:
即它等于所有该状态收获的期望,而蒙特卡罗做的事是在计算值函数时,用经验平均代替随机变量的期望。比如我们在一次 episode 中,状态 \(s\) 出现后得到的收获为:
有了一次 episode 就可以有多次,所以状态值函数 \({v_\pi }\left( s \right)\) 为:
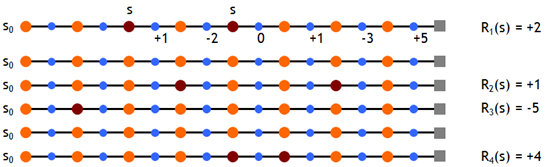
现在有个问题是:状态 \(s\) 可能在一个 episode 中出现不止一次,从下图中就可以看出来。图中每一行都是当前策略下的一个独立的 episode.
这种情况有两种处理的方式,分别为:
第二种方法比第一种的计算量要大一些,但是在完整的经历样本序列少的场景下会比第一种方法适用
图中是用第一种方法计算的 return,所以 \(R_1(s)=1-2+0+1-3+5=2\). 最后得到的 \({v_\pi }\left( s \right)\) 为:
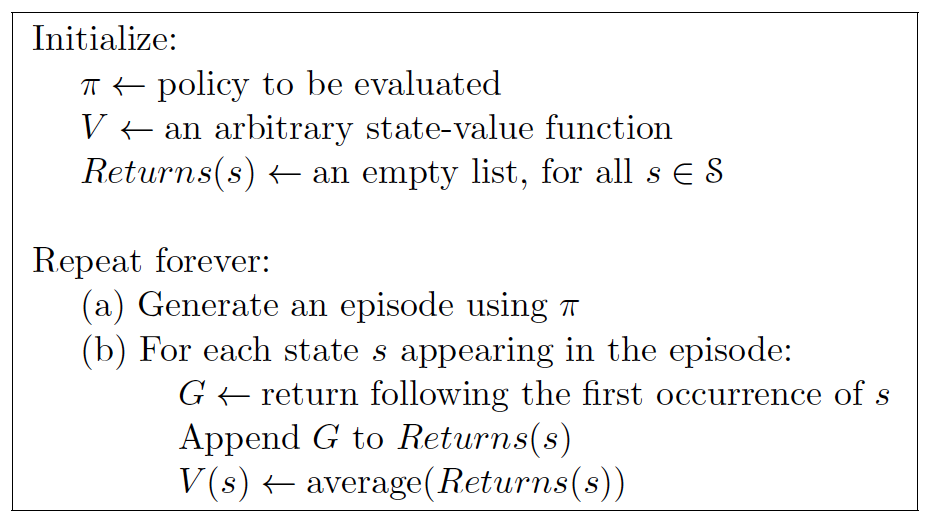
很明显生成的 episode 越多,对状态值函数 \({v_\pi }\left( s \right)\) 的估计就越准确,具体的算法流程为\([2]\):
我们在使用动态规划方法进行策略改进时,是假设环境状态转移概率 \(p(s^ {\prime}|s,a)\) 是已知的,这样我们才能评判下一步采取什么 action 会更好。但是现在我们并不知道 \(p(s^ {\prime}|s,a)\),也就没办法按以前的方法进行策略改进。
所以我们不如用相同的办法直接对动作值函数 \({Q^\pi }\left( {s,a} \right)\) 进行估计:
\(\tau^{(n)}\) 也就是第 \(n\) 个轨迹,也就是第 \(n\) 个 episode.
蒙特卡罗控制(Monte Carlo Control) 首要的问题就是如何估计最优策略,我们需要产生无数的 episode 才能保证收敛到最优结果。无数的 episode 和大量的迭代导致计算量巨大,效率非常低。主要有两种办法解决这个问题:
然而我们需要考虑一个严重的问题:在所有样本片段集合中,很多 state-action 对并不出现,比如当我在一个确定的 policy下,有可能某个 state 下只出现有限的几个对应的 actions,其他的 actions 都基本不出现。这样我们根本没有 returns 去 average,怎么能估计到某些 \({Q^\pi }\left( {s,a} \right)\) 呢?
比如在下五子棋,机器如果使用greedy的方法的话,从直观上来看下的每一步棋都对当前很有利。但是一些高手,看似下了一步很不相关的棋,但是从长远来看可能是一个战略上的布局,这个不相关的棋从长远来看收益可能更大,只不过我们永远不会去走那一步棋。
为了保证策略迭代对于所有行为值有效,我们必须保证持续的探索。一种解决的方法是在状态序列开始时,每个状态行为对被选到的概率都不为 0,这种方法称为探索初值假定(exploring starts)。
下面给出 Monte Carlo with Exploring Starts 算法流程:
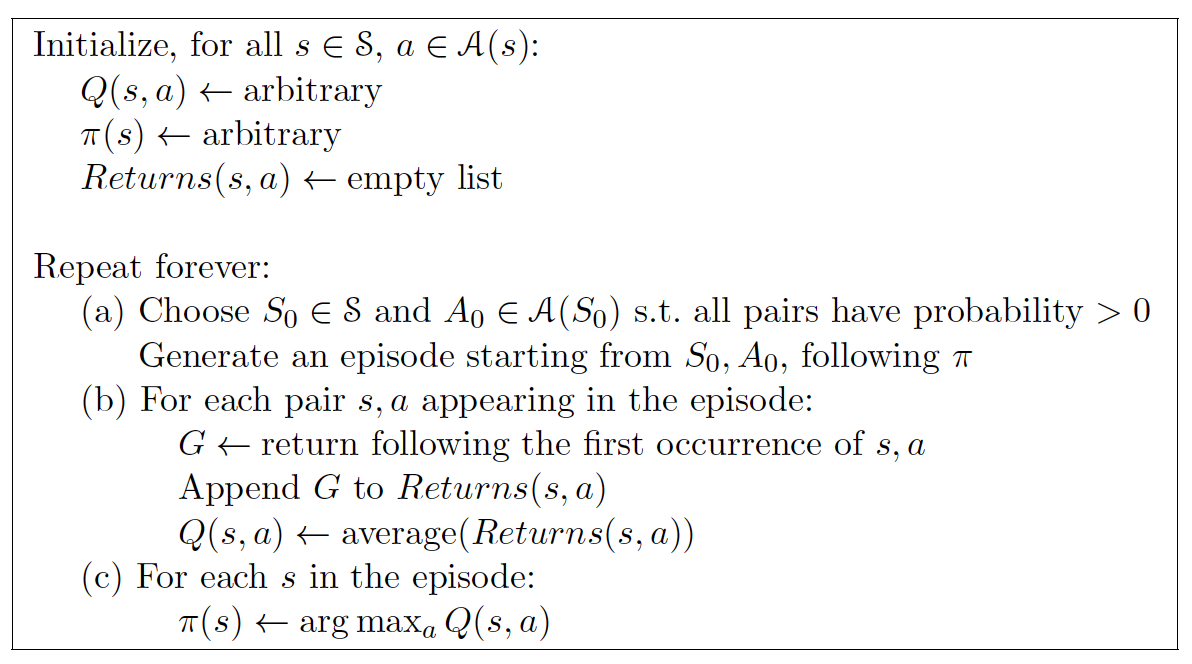
Exploring start 这个方案在模拟产生 episodes 也许可行,但是在从真实经验中学习时就不可行了,因为我们无法控制 start point。
On-policy Monte Carlo Control 为了避免初始状态假定而引入了随机策略。也就是在决策的时候以一定的概率选择那些不是最大回报的行为值。这样提供了探索的可能性,保证了所有状态能被访问到。On-policy Monto Carlo 控制方法的大体思想还是 GPI,但是没有探索初值假定的条件。
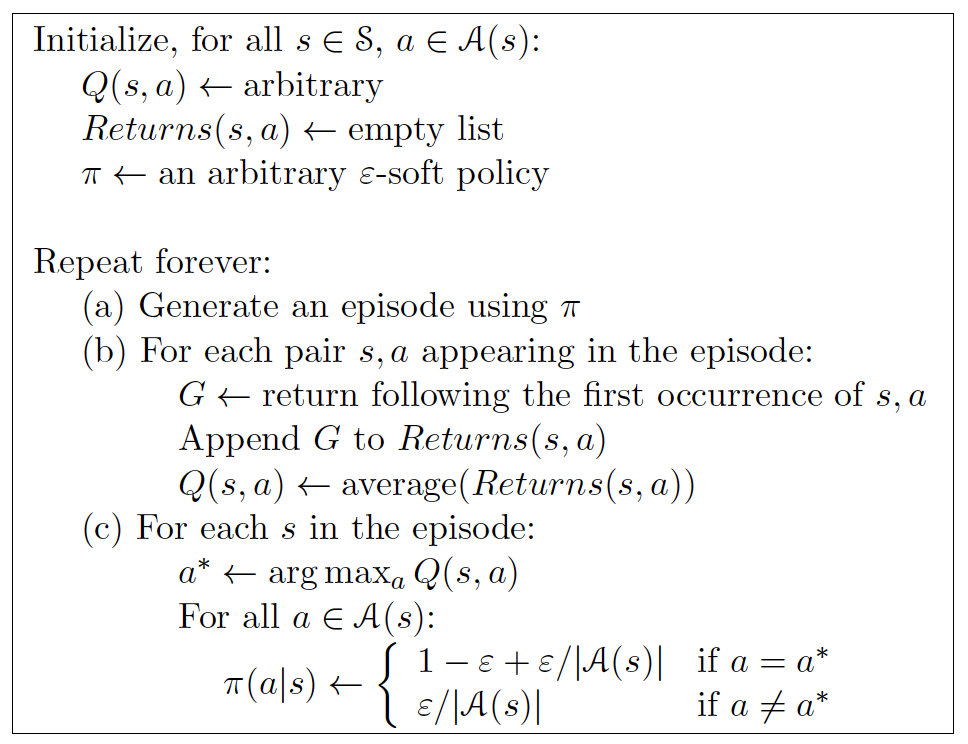
记录一下疑问:这每一轮实验使用的是一个新的策略\(\pi\)产生的,而这轮实验在某个状态\((s,a)\)所带来的回报\(G\)又加入到\(Return(s,a)\)去求了平均,那最后这个\(Q(s,a)\)岂不是由多个策略共同生成的结果? 还是说这个\(Return(s,a)\)在每轮进行完会清空呢?
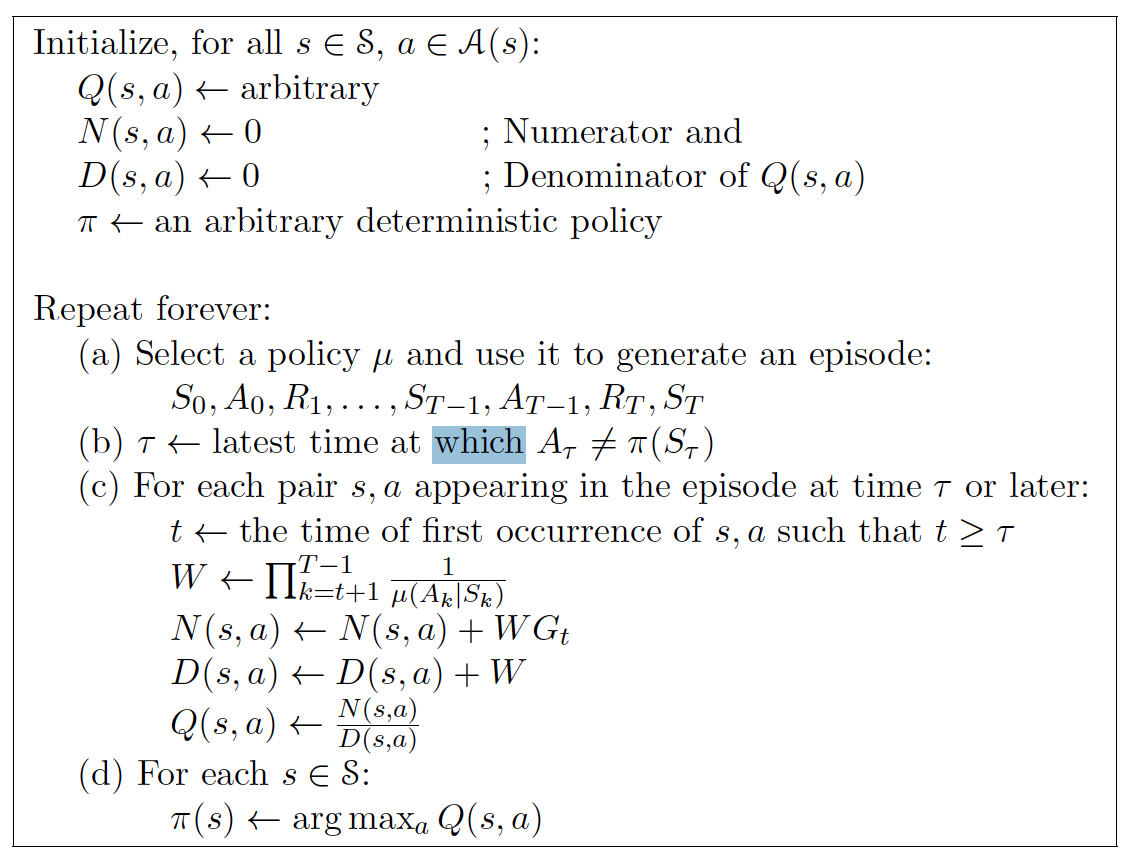
一个更直截了当的方法是 off-policy:使用两个策略,一个策略用来学习最优策略,另一个则更具探索性地用来产生行为。 用来学习的策略我们称之为 目标策略 ,另一个用来生成行为的称作行为策略。
蒙特卡罗法提供了一个替代的策略评估过程。蒙特卡罗法简单地对于从状态开始的 return 取均值,而不是用模型去算每个状态的值。蒙特卡罗法区别于 DP 方法主要在两方面:
标签:hub 完全 tps 带来 产生 化学 估计 流程 returns
原文地址:https://www.cnblogs.com/MayeZhang/p/12787723.html